

前言
上一篇介绍了快速搜索随机树(RRT)算法的原理,这是一种基于采样的路径规划算法,在地图尺寸较大时,其效率将显著的优于基于图搜索的路径规划算法(如A*)。
然而,RRT也有其局限性,如:
- 狭窄通道情况下的搜索效率急剧下降
- 搜索得到的路径不是全局最优的
快速获取搜索树中的相邻节点
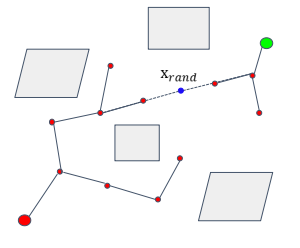
RRT算法中有一个重要的环节——获取搜索树种距离采样点最近的节点: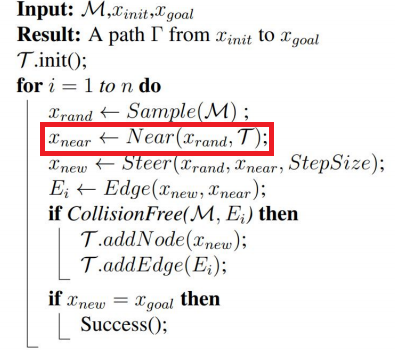
该算法的效率直接影响了RRT算法的搜索效率,因此,本篇单独对其进行讨论。 在工程中,我们将搜索树构建为KD-Tree(K-dimensional Tree),通过KD-Tree来搜索相邻节点,它改进的就是上图中的![[公式]](https://www.zhihu.com/equation?tex=Near%28x_%7Brand%7D%2C%5Ctau%29) 函数的效率,那么什么是KD-Tree呢? KD-Tree(K-dimension tree)是一种对
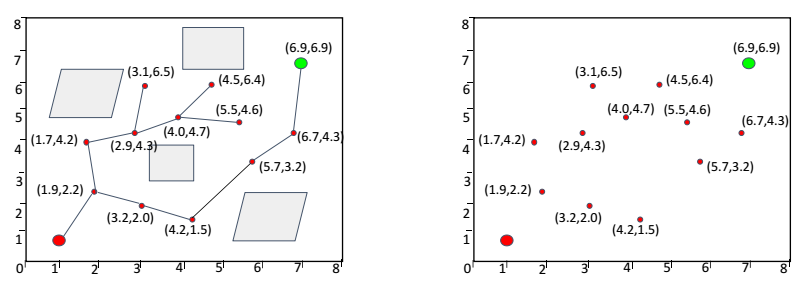
函数的效率,那么什么是KD-Tree呢? KD-Tree(K-dimension tree)是一种对![[公式]](https://www.zhihu.com/equation?tex=k) 维空间中的实例点进行存储以便对其进行快速检索的树形数据结构。KD-Tree是一种二叉树,表示对维空间的一个划分,构造KD-Tree相当于不断地用垂直于坐标轴的超平面将维空间切分,构成一系列的维超矩形区域。KD-Tree的每个结点对应于一个维超矩形区域。利用KD-Tree可以省去对大部分数据点的搜索,从而减少搜索的计算量。 对于RRT算法,我们对搜索树进行KD-Tree构建,以二维问题为例,我们取所有节点中
维空间中的实例点进行存储以便对其进行快速检索的树形数据结构。KD-Tree是一种二叉树,表示对维空间的一个划分,构造KD-Tree相当于不断地用垂直于坐标轴的超平面将维空间切分,构成一系列的维超矩形区域。KD-Tree的每个结点对应于一个维超矩形区域。利用KD-Tree可以省去对大部分数据点的搜索,从而减少搜索的计算量。 对于RRT算法,我们对搜索树进行KD-Tree构建,以二维问题为例,我们取所有节点中![[公式]](https://www.zhihu.com/equation?tex=x) 方向的中位数节点为切割点,将所有节点分为两部分,再对所有节点中
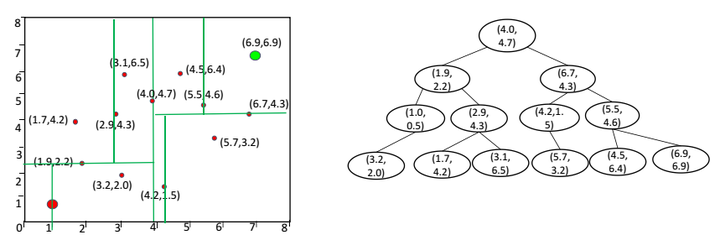
方向的中位数节点为切割点,将所有节点分为两部分,再对所有节点中![[公式]](https://www.zhihu.com/equation?tex=y) 方向的中位数节点为切割点分割,以此类推,最终将搜索树中的所有节点划分完毕,即得到KD-Tree。
方向的中位数节点为切割点分割,以此类推,最终将搜索树中的所有节点划分完毕,即得到KD-Tree。
在得到KD-Tree后,我们可以根据需要,快速地搜索到距离节点最近的节点,大大提高
函数的搜索效率。
狭窄通道问题(Narrow Passage)
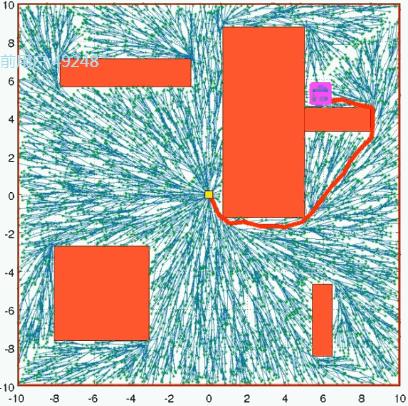
由于RRT算法通常采用蒙特卡洛法采样,其采样概率是均匀分布的,因此,对于狭窄通道(Narrow Passage)的情况,RRT算法的搜索效率将大大降低(搜索树的生长需要经过狭窄通道才能达到目标点,而采样点刚好落在狭窄通道的概率相对于整张地图而言较低),由此,会产生如下现象: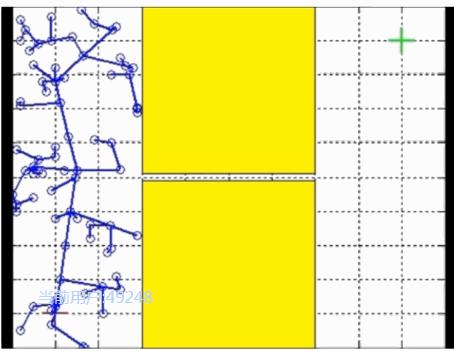
对于该类问题,我们往往采用RRT-Connect算法进行处理,如下图所示,与RRT不同的是,RRT-Connect分别从起始点和目标点构建搜索树,直到两棵搜索树相交,找到一条可通行的路径。
该算法可以大大降低Narrow Passage中由于狭窄通道采样概率较低的问题,具体的实现在此不做赘述,读者可自行搜索Bidirectional RRT / RRT Connect。
RRT * 与 Informed-RRT*
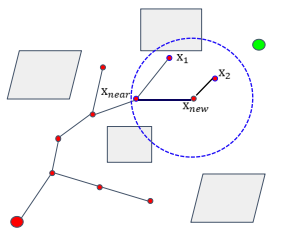
传统的RRT算法搜索得到的路径往往不是全局最优的,于是,RRT算法的改进型——RRT*应运而生。 RRT*是在 RRT算法框架基础上进行了一定的改进,算法流程如下图所示:
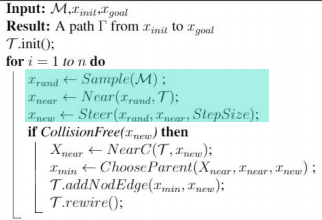
![[公式]](https://www.zhihu.com/equation?tex=Sample) 函数在地图中进行采样,然后在搜索树
函数在地图中进行采样,然后在搜索树![[公式]](https://www.zhihu.com/equation?tex=%5Ctau) 中寻找其最近的节点
中寻找其最近的节点![[公式]](https://www.zhihu.com/equation?tex=x_%7Bnear%7D) 同时,在
同时,在![[公式]](https://www.zhihu.com/equation?tex=x_%7Brand%7D) 与
与 ![[公式]](https://www.zhihu.com/equation?tex=+x_%7Bnear%7D+) 连线方向进行扩展得到
连线方向进行扩展得到![[公式]](https://www.zhihu.com/equation?tex=x_%7Bnew%7D) ,然后,我们对节点在地图中进行碰撞检测,若
,然后,我们对节点在地图中进行碰撞检测,若![[公式]](https://www.zhihu.com/equation?tex=CollisionFree) 则进行下一步;反之,则放弃该节点。
则进行下一步;反之,则放弃该节点。
与RRT不同的是,RRT*中,我们在碰撞检测成功后,搜索以![[公式]](https://www.zhihu.com/equation?tex=R) 为半径,以节点为圆心范围内的搜索树上的相邻节点集合
为半径,以节点为圆心范围内的搜索树上的相邻节点集合![[公式]](https://www.zhihu.com/equation?tex=X_%7Bnear%7D) ,即上图中的
,即上图中的![[公式]](https://www.zhihu.com/equation?tex=NearC%28%5Ctau%2Cx_%7Bnew%7D%29) 函数。
函数。
这里可以对上文提及的KD-Tree搜索方法进行一定的改进,即将节点与搜索树中欧氏距离小于的所有满足条件的叶子节点添加进相邻节点集合即可。
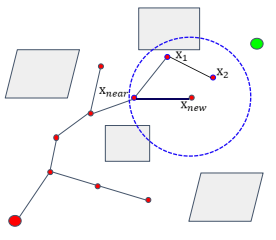
然后,在相邻节点集合中为选取其父节点,即![[公式]](https://www.zhihu.com/equation?tex=ChooseParent%28X_%7Bnear%7D%2Cx_%7Bnear%7D%2Cx_%7Bnew%7D%29) 函数,该函数通过计算集合中所有叶子节点与节点的欧氏距离的最小值来选择节点的父节点,从而将其加入搜索树。
函数,该函数通过计算集合中所有叶子节点与节点的欧氏距离的最小值来选择节点的父节点,从而将其加入搜索树。
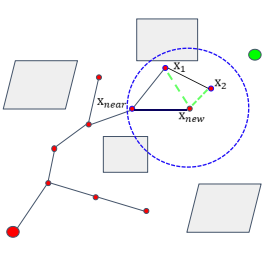
最后,我们需要对重建的搜索树进行剪枝(![[公式]](https://www.zhihu.com/equation?tex=rewire) ),该步骤也是RRT*的精髓。对于重建之后的搜索树,我们需要对集合中的所有叶子节点到起始节点的代价(欧氏距离)进行判断,若存在更短路径,则重新修改叶子节点的父节点,从而完成剪枝。
),该步骤也是RRT*的精髓。对于重建之后的搜索树,我们需要对集合中的所有叶子节点到起始节点的代价(欧氏距离)进行判断,若存在更短路径,则重新修改叶子节点的父节点,从而完成剪枝。
例如,![[公式]](https://www.zhihu.com/equation?tex=X_%7B2%7D) 节点的父节点原本为
节点的父节点原本为![[公式]](https://www.zhihu.com/equation?tex=X_%7B1%7D) ,由于经过
,由于经过![[公式]](https://www.zhihu.com/equation?tex=X_%7Bnew%7D) 到起始点的路径代价更小,因此,这里修改的父节点为,同理,对其他相邻节点进行类似操作,从而完成剪枝。
到起始点的路径代价更小,因此,这里修改的父节点为,同理,对其他相邻节点进行类似操作,从而完成剪枝。
整个过程如下所示,可以看到,RRT* 在搜索到一条可通行路径后,并未停止迭代,而是继续剪枝。从而得到一条接近全局最优的可通行路径,因此,RRT* 较RRT在实际工程中有更广泛的应用。
从上图可以很容易地发现一个问题,当RRT*找到一条可通行路径时,其采样函数依然在整个地图空间中进行均匀采样,然而进行剪枝等操作,那么这样的采样方式显然会耗费大量不必要的时间。
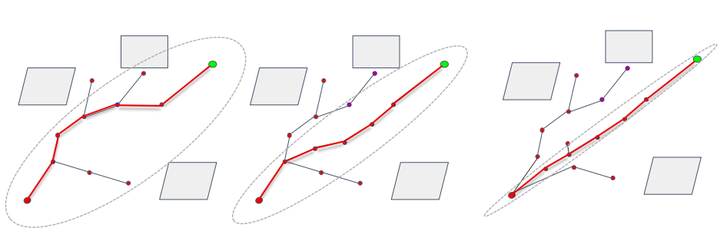
Informed-RRT* 被用于优化该问题,如下图所示,Informed-RRT* 较RRT*节省了大量的时间,究其原因在于优化了采样方式。
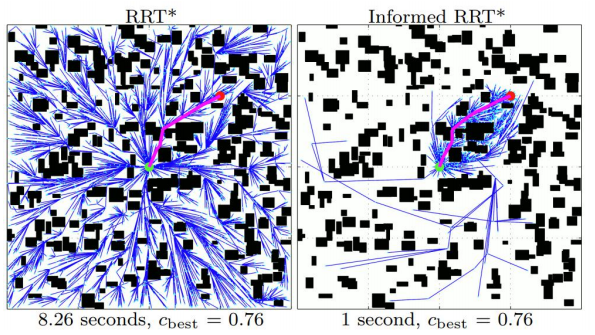
Informed-RRT* 在得到一条可通行路径的基础上,以起始点与目标点之间的连线为椭圆的长轴构建椭圆形采样区域,采样函数的采样范围被重新限制在该区域范围之中,随着搜索树的不断剪枝,椭圆范围也在不断地缩小,采样时间也随之减少,由此,大幅度节省RRT*的时间开销。
总结
本篇阐述了一种提高RRT算法搜索效率的数据结构——KD-Tree,并围绕RRT算法应用中碰到的几个问题展开,简述了RRT算法的几种改进型——RRT* 与Informed-RRT*,下一篇中将对满足动力学约束的基于采样的路径规划算法展开讨论。作者简介: 一个被Coding耽误的无人机算法工程师,控制、导航略懂一二,热衷技术,喜欢乒乓、音乐、电影,欢迎交流。 知乎: @遥远的乌托邦 GitHub: https://github.com/DistantUtopia



评论(1)
您还未登录,请登录后发表或查看评论