

一、 概述
RHex 是一种动力自主、不受束缚、柔顺腿结构的六足机器人,该项目于 1998 年由 DARPA CBS/CBBS 计划开始启动,第一个原型由 Uluc Saranli 于 1999 年建造,随后对平台设计和算法进行了多次修改和改进,不同迭代的机器人种类如图1所示。

图1 RHex的迭代
RHex在模拟实践中可实现的功能如图2,在项目结束后,最终迭代的RHex机器人达到的能力包括
- 在相当平坦的自然地形上以高达每秒 5 个身体长度的速度运行(刚好超过 2.25m/s)
- 爬上各种各样的楼梯
- 爬坡高达 45 度
- 穿越高达20cm的障碍物(大约是RHex腿部间隙的两倍)
- 连续跑步 45 分钟,以高效步态覆盖长达 3 英里
- 成功穿越带有大块岩石和障碍物的严重破碎地形
- 倒立行走和奔跑
- 翻转后仍可以行走
- 跨越30厘米宽的沟渠
- 支持最远150m距离遥控
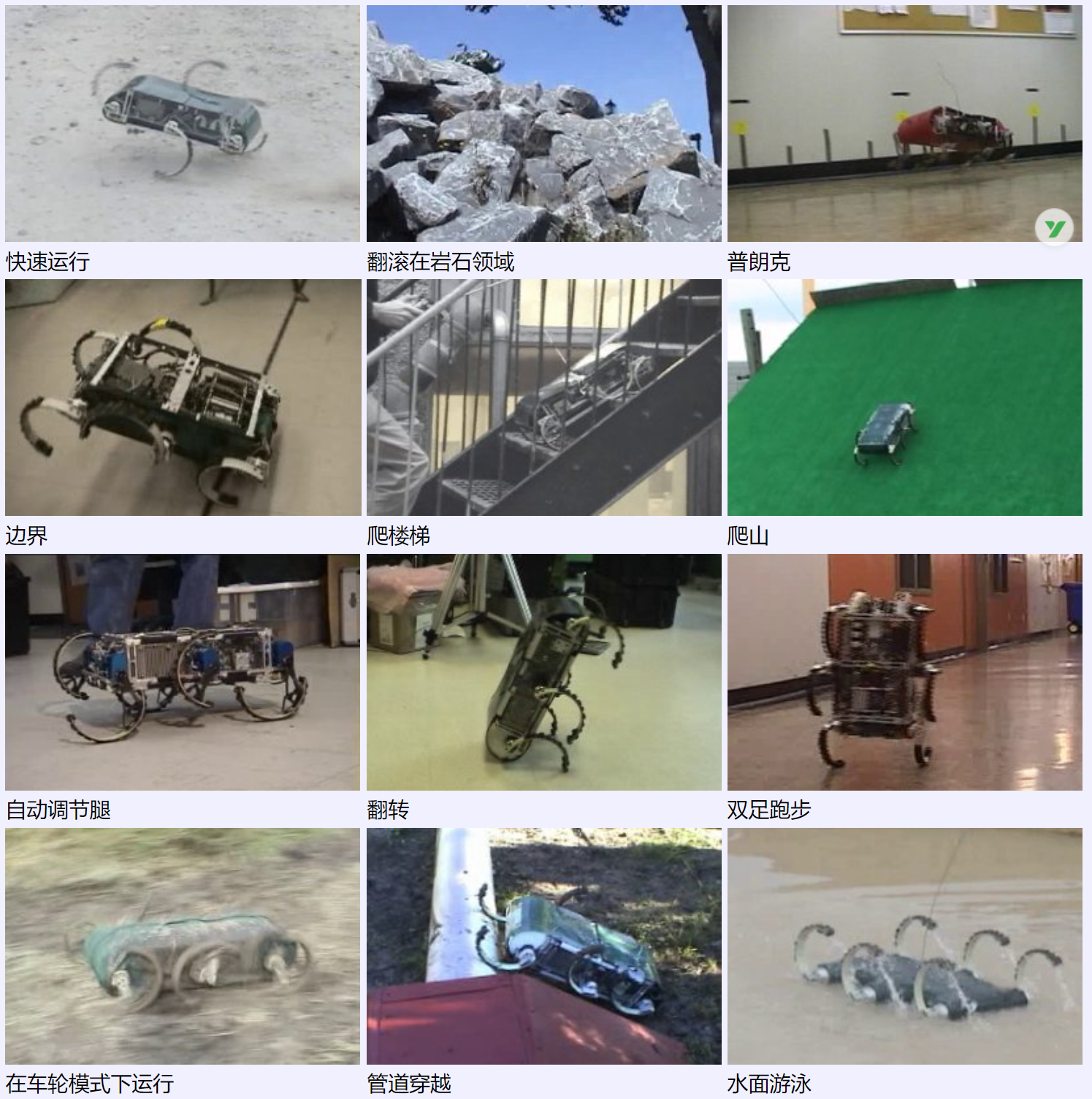
图2 RHex可实现的功能
从结构上看,RHex 只有六个执行器——每个髋关节一个电机,如此简单的机械结构仍能保证任务执行中的可靠和稳健操作,这是源于其控制方面非常简单的时钟驱动、开环三脚架步态等,不得不说非常巧妙。本文将从仿生、控制模型两个角度阐述该款机器人的技术内容。
二、仿生原理

图3 蟑螂生物体态
三、弹簧倒立摆(SLIP)模型
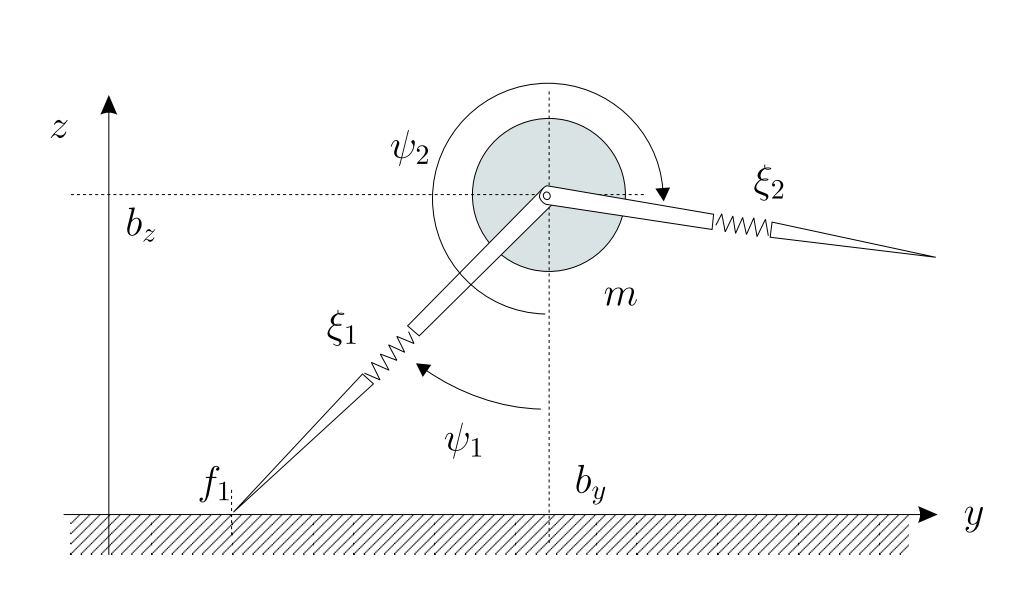
图4 弹簧倒立摆模型
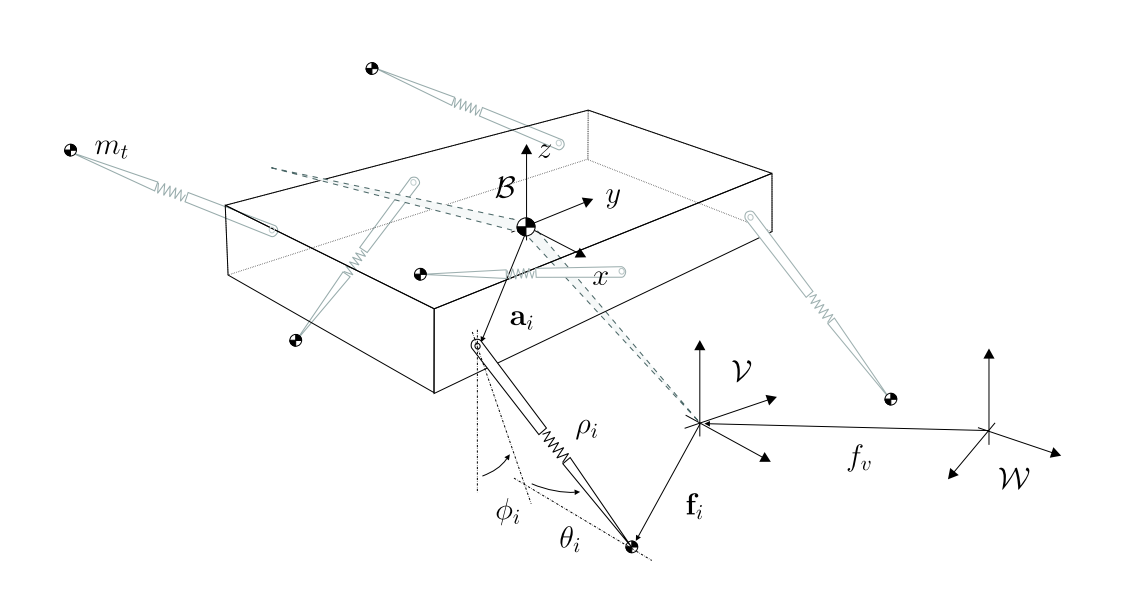
图5 空间六足机器人
RHex由此演化的空间六足模型,如图5所示,定义了三个参考系:W 为固定惯性世界坐标系,V 为虚拟足端坐标系,位于“虚拟腿”的脚部, B 为基体坐标系,固定在系统的质心上。除了绕 z 轴的偏航旋转外,V 和 W 具有相同的方向。身体的方向由偏航 γ、俯仰 α 和滚转 β 角自由度决定。该模型由一个刚体和六个带有固定连接点的柔顺腿组成,每条腿都有较小的足部质量,以适应其飞行动力学以及径向和侧向扭转弹簧和粘性阻尼器:对于站立的腿,脚趾位置fi固定在地面上,而抬起的腿不会对身体施加力。因此,在腿部力量的影响下,腿部的运动由脚趾质量控制。此外,抬起的腿的脚趾质量的位置和速度成为独立的坐标。控制的目标是选择合适的髋关节扭矩,以便六足重心的动力学尽可能准确地模拟 BSLIP 的被动姿态动力学,从而运动的速度和高度。
四、RHex本体结构及控制策略
1.机械本体结构
RHex的设计可以说是非常简单,相对六足机器人中的极简的一种设计,整个机体的腿部只保留了髋部关节,每个腿只有一个独立驱动的旋转自由度,六个致动器分别驱动六条腿的髋关节运动;腿部采取半圈的结构,旋转运动时可以避免腿部之间互相干扰,同时又可以满足三角步态支撑足和摆动足的轮替,腿的附着点以及关节方向都相对于身体是固定的。身体由一个刚体组成,机体结构十分紧凑。
图6为ScienceParrot团队设计的新版本T-RHex的结构拆分图,结构上十分相近,其中尾巴可以防止向后倾斜;腿上的锥形脚趾(微刺)有助于增强抓地能力,从而方便在不同的地形上行走。

图6 ScienceParrot团队的T-RHex
此外,这种结构在翻转后(肚皮朝上)的情况下,仍然可以保持很好的运动状态。
2. 控制策略
原型机器人没有可以估计其身体状态的外部传感器,其控制是使用了一个四参数控制器,可以在平坦地形上产生六足动物的平移和转向,而无需明确执行准静态稳定性。所有控制器周期性的生成每个髋关节所需轨迹,然后由六个本地 PD 控制器(每个单独的髋部执行器一个)执行。
(1)前行步态
三脚步态的开环控制器的目标轨迹是时间的周期函数,由四个变量参数化:tc、ts、φs 和 φo,分别代表单腿旋转周期、慢腿摆动持续时间、用于慢速摆动腿的腿后掠角、腿角偏移。
在单个循环中,两个支撑三脚都经历慢速和快速摆动阶段,分别涵盖完整旋转的 φs 和 2π−φs。 ts 确定每个三脚架相对于其慢速和快速阶段的持续时间的占空比。 φo 参数表示相对于垂直方向偏移运动轮廓。在运动期间针对特定的期望行为通过修改这些参数来实现运动控制。
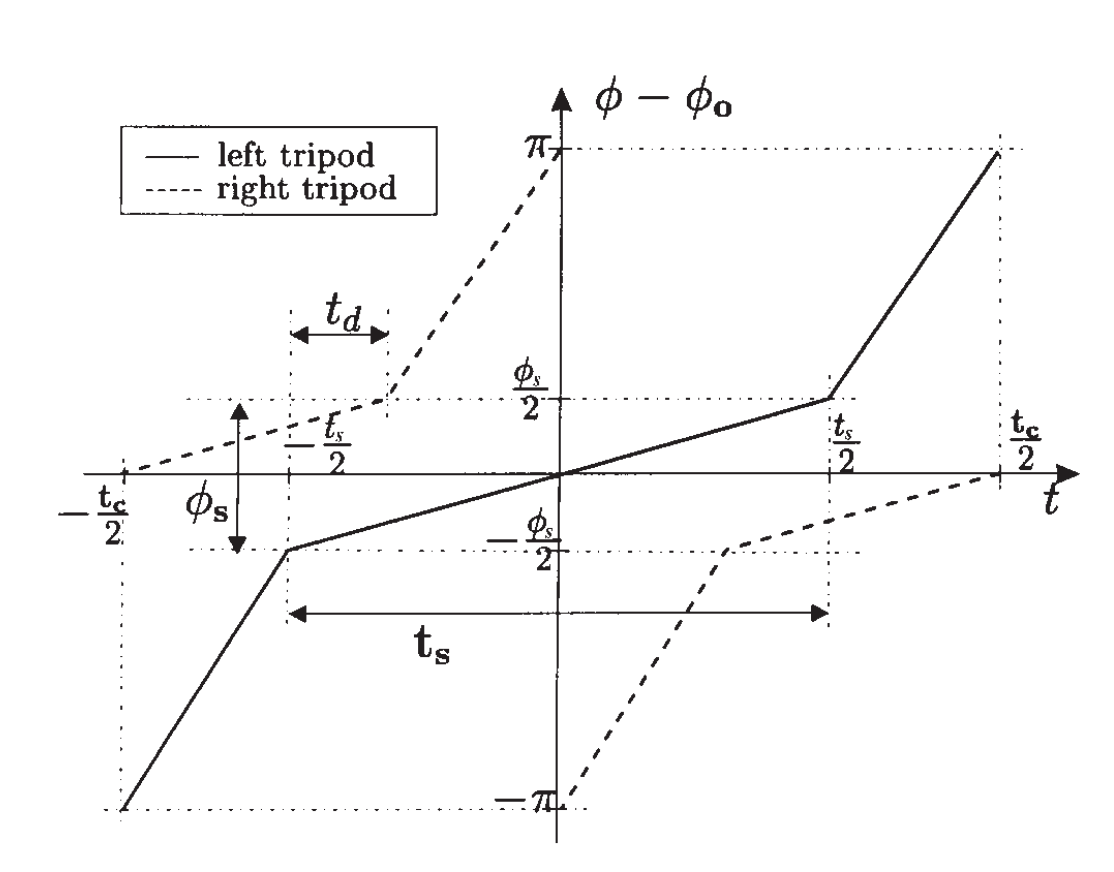
图7 三角步态时间周期函数
(2)转弯步态
转弯步态可以分为两类:原地转弯和移动转弯。该步态控制的思维方式源自轮式和履带式车辆的差动转向,原地转弯时一侧的三条腿轨迹与向前运动相同,只是对侧的一组腿以相反的方向旋转。这导致六足动物在由左右腿组的旋转极性决定的方向上原地转动,转弯率取决于特定运动参数的选择,主要是 tc 和 φs 。
参考文献
[1]Uluc, Saranli, Martin, et al. RHex: a simple and highly mobile hexapod robot[J]. International Journal of Robotics Research, 2001.
[2] Altendorfer R , Moore N , Komsuoglu H , et al. RHex: A Biologically Inspired Hexapod Runner[J]. Autonomous Robots, 2001, 11(3):207–213.
[3] Altendor Fe R R , Saranli U , Komsuoglu H , et al. Evidence for Spring Loaded Inverted Pendulum Running in a Hexapod Robot[C]// Experimental Robotics VII [ISER 2000, Waikiki, Hawaii, USA, December 11-13, 2000]. DBLP, 2000.
[4] Buehler U S M , Koditschek' D E . Design, modeling and preliminary control of a compliant hexapod robot[C]// IEEE International Conference on Robotics & Automation. IEEE, 2000.


评论(0)
您还未登录,请登录后发表或查看评论