

一、旋转矩阵
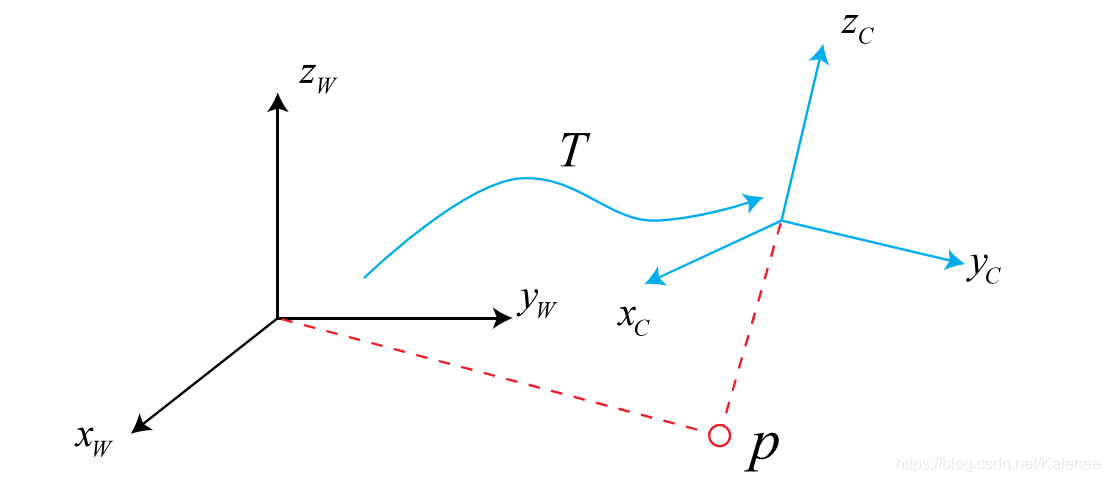
在机器人运动的过程当中,我们通常会设定一个惯性坐标系(或者叫世界坐标系),姑且认为这个坐标系是固定不动的。例如:是固定不动的世界坐标系,
,
,
是机器人坐标系。存在一个向量
,在世界坐标系下的坐标是
,在移动机器人坐标系下的坐标是
,通常情况下,我们通过传感器已知移动机器人坐标系统下的坐标
,来求在世界坐标系下的坐标
二、旋转向量(轴角,Axis-Angle)
旋转向量为一个三维向量,实际上即为李代数。
任意旋转可以通过一个旋转轴和一个旋转角来表示,使用一个向量,其方向与旋转轴一致,而长度等于旋转角。这种向量,称为旋转向量或轴角(Axis-Angle)。
旋转向量转换到旋转矩阵通过罗德里格斯公式(Rodrigues’s Formula)实现:
旋转矩阵转换到旋转向量,对于转角
tr(A)=the trace of the matrix A 矩阵A的迹,为主对角线(从左上方至右下方的对角线)上各个元素的总和。
转轴n,由于旋转轴上的向量在旋转后不发生改变,说明
因此,转轴n是矩阵R特征值对应的特征向量。求解此方程,再归一化,就得到了旋转轴。
三、欧拉角
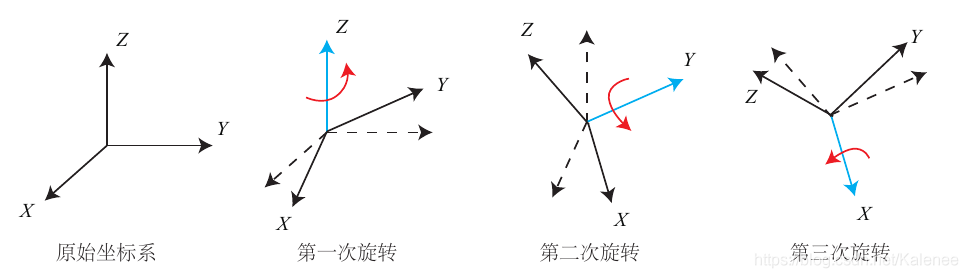
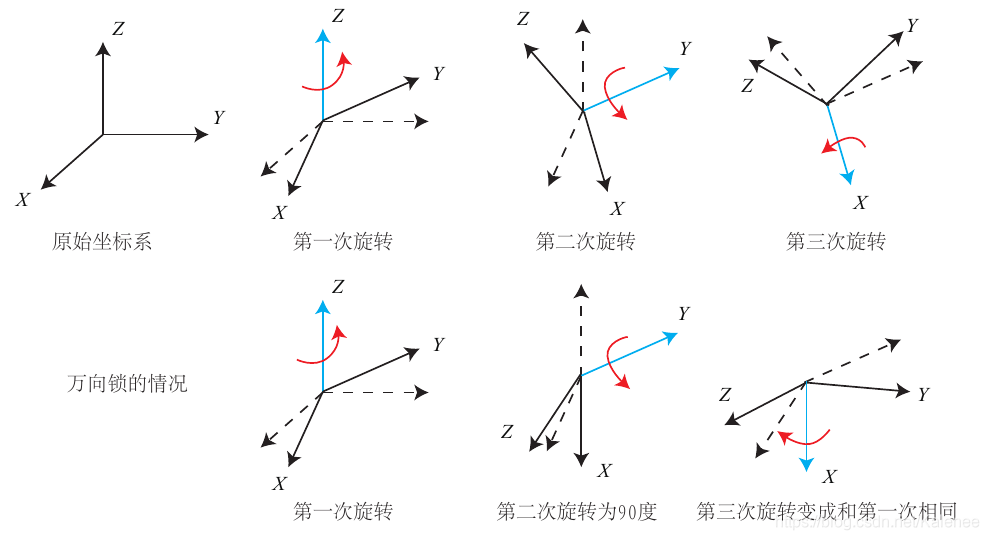
旋转本身就是一个很直观的现象。欧拉角可以提供一种非常直观的方式。他利用3个分离的转角,把一次旋转分解成3次绕不同的轴进行旋转。例如先绕x轴旋转,再绕y轴旋转,最后绕z轴旋转,这样就得到一个xyz轴的旋转。在欧拉角中一个常用的是“航偏-俯仰-翻滚”(yaw-pitch-roll)。可以简单记忆rpy-xyz。其中roll-对应着绕x轴旋转后的翻滚角。Pitch对应着绕y轴旋转后的俯仰值,yawd对应着绕z轴旋转后的航偏值。那么旋转部分就可以通过roll-pitch-yaw这三个量来描述。在使用欧拉角这种表达方式的时候,会存在万象锁的问题。也就是一旦旋转pitch为90度,就会导致第一次旋转和第三次转换等价,丢失了一个表示维度。万象锁现象如下图所示
3.1 欧拉角转旋转矩阵
3.2 欧拉角转四元数
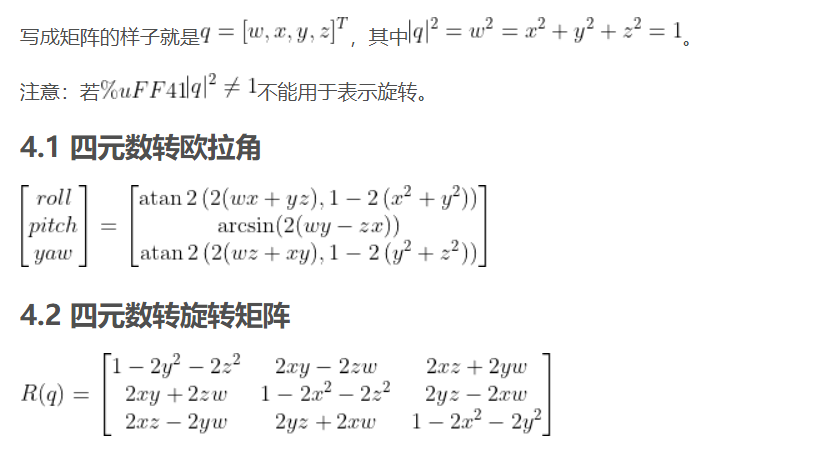
四、四元数
旋转矩阵用9个量来描述3自由度的旋转,具有冗余性;欧拉角虽然用3个量来描述3自由度的旋转,但是具有万向锁的问题,因此我们选择用四元数,(ROS当中描述转向的都是采用的四元数)。一个四元数拥有一个实部和三个虚部组成。
三个虚部满足以下关系
补充:四元数动画演示
五、不同运动描述转换的程序实现
5.1 C++
- 旋转矩阵
//旋转矩阵初始化 Eigen::Matrix3d R=Matrix3d::Identity(); //input: wxyz Eigen::Matrix3d quat2rotm(double w, double x, double y, double z) { Eigen::Quaterniond q; q.w() = w; q.x() = x; q.y() = y; q.z() = z; Eigen::Matrix3d R = q.normalized().toRotationMatrix(); //Eigen::Matrix3d R = q.normalized().matrix();//另一种方式 return R; } Eigen::Matrix3d eul2rotm(double yaw, double pitch, double roll) { Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitZ()); Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitY()); Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitX()); Eigen::Quaterniond q = yawAngle * pitchAngle * rollAngle; Eigen::Matrix3d R = q.matrix(); return R; } Eigen::Matrix3d angle2rotm(Eigen::AngleAxisd angle) { return angle.toRotationMatrix(); //return angle.matrix();//另一种方式 }- 旋转向量
//使用旋转的角度和旋转轴向量(此向量为单位向量)来初始化角轴 Eigen::AngleAxisd V1(M_PI / 4, Vector3d(0, 0, 1)); //以(0,0,1)为旋转轴,旋转45度 Eigen::AngleAxisd eul2angle(double yaw, double pitch, double roll) { Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitZ()); Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitY()); Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitX()); Eigen::AngleAxisd angle; angle = yawAngle * pitchAngle * rollAngle; return angle; } Eigen::AngleAxisd eul2angle(Eigen::Quaterniond q) { // Eigen::AngleAxisd angel; // angel = q; Eigen::AngleAxisd angel(q); return angel; } Eigen::AngleAxisd rotm2angle(Eigen::Matrix3d rotm) { //Eigen::AngleAxisd angel(rotm); // Eigen::AngleAxisd angel; // angel = rotm; Eigen::AngleAxisd angel; return angel.fromRotationMatrix(rotm); }- 欧拉角
// input: wxyz // outpuy: zyx Eigen::Vector3d quat2eul(double w, double x, double y, double z) { Eigen::Quaterniond q; q.w() = w; q.x() = x; q.y() = y; q.z() = z; Eigen::Vector3d euler = q.toRotationMatrix().eulerAngles(2, 1, 0); return euler; } Eigen::Vector3d rotm2eul(Eigen::Matrix3d R) { Eigen::Matrix3d m; m = R; Eigen::Vector3d euler = m.eulerAngles(2, 1, 0); return euler; } Eigen::Vector3d angle2eul(Eigen::AngleAxisd angle) { return angle.toRotationMatrix().eulerAngles(2, 1, 0); }- 四元数
//对四元数赋值的三大种方法(注意Eigen库中的四元数前三维是虚部,最后一维是实部,即x,y,z,w) //1.使用旋转的角度和旋转轴向量(此向量为单位向量)来初始化四元数,即使用q=[cos(A/2),n_x*sin(A/2),n_y*sin(A/2),n_z*sin(A/2)] Quaterniond Q1(cos((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 1 * sin((M_PI / 4) / 2));//以(0,0,1)为旋转轴,旋转45度 //第一种输出四元数的方式 cout << "Quaternion1" << endl << Q1.coeffs() << endl; //第二种输出四元数的方式 cout << Q1.x() << endl << endl; cout << Q1.y() << endl << endl; cout << Q1.z() << endl << endl; cout << Q1.w() << endl << endl; //input: zyx Eigen::Quaterniond eul2quat(double yaw, double pitch, double roll) { Eigen::AngleAxisd yawAngle(yaw, Eigen::Vector3d::UnitZ()); Eigen::AngleAxisd pitchAngle(pitch, Eigen::Vector3d::UnitY()); Eigen::AngleAxisd rollAngle(roll, Eigen::Vector3d::UnitX()); Eigen::Quaterniond q = yawAngle * pitchAngle * rollAngle; return q; } Eigen::Quaterniond rotm2quat(Eigen::Matrix3d R) { // Eigen::Quaterniond q; // q = R; Eigen::Quaterniond q = Eigen::Quaterniond(R); q.normalize(); return q; } Eigen::Quaterniond angle2quat(Eigen::AngleAxisd angle) { // Eigen::Quaterniond q; // q = angle; return Eigen::Quaterniond(angle); }- 变换矩阵
// 通过旋转矩阵和平移矩阵初始化 Eigen::Isometry3d T=Eigen::Isometry3d::Identity(); // 虽然称为3d,实质上是4*4的矩阵 T.rotate ( rotation_vector ); // 可以使用四元数,旋转矩阵和旋转向量 T.pretranslate ( Eigen::Vector3d ( 1,3,4 ) ); // 把平移向量设成(1,3,4) // 获取矩阵形式 cout << "Transform matrix = \n" << T.matrix() << endl;// 获取矩阵形式 cout << "rotation = \n" << T.rotation() << endl;// 获取旋转矩阵 cout << "translation = \n" << T.translation() << endl;// 获取平移矩阵- 5.2 Matlab欧拉角转换到四元数
quat = eul2quat(eul) quat = eul2quat(eul,sequence)sequence参数如下,默认为'ZYX'
'ZYX' (default) – The order of rotation angles is z-axis, y-axis, x-axis.
'ZYZ' – The order of rotation angles is z-axis, y-axis, z-axis.
'XYZ' – The order of rotation angles is x-axis, y-axis, z-axis.
注意:quat输出为 [w x y z]
四元数转换到欧拉角
eul = quat2eul(quat) eul = quat2eul(quat,sequence)sequence参数如下,默认为'ZYX'
'ZYX' (default) – The order of rotation angles is z-axis, y-axis, x-axis.
'ZYZ' – The order of rotation angles is z-axis, y-axis, z-axis.
'XYZ' – The order of rotation angles is x-axis, y-axis, z-axis.
旋转矩阵转换到四元数
quat = rotm2quat(rotm)- 四元数转换到旋转矩阵
rotm = quat2rotm(quat)- 欧拉角转换到旋转矩阵
rotm = eul2rotm(eul) rotm = eul2rotm(eul,sequence)sequence参数如下,默认为'ZYX'
'ZYX' (default) – The order of rotation angles is z-axis, y-axis, x-axis.
'ZYZ' – The order of rotation angles is z-axis, y-axis, z-axis.
'XYZ' – The order of rotation angles is x-axis, y-axis, z-axis.
旋转矩阵转换到欧拉角
eul = rotm2eul(rotm) eul = rotm2eul(rotm,sequence)sequence参数如下,默认为'ZYX'
'ZYX' (default) – The order of rotation angles is z-axis, y-axis, x-axis.
'ZYZ' – The order of rotation angles is z-axis, y-axis, z-axis.
'XYZ' – The order of rotation angles is x-axis, y-axis, z-axis.
5.3 python
from scipy.spatial.transform import Rotation as R参考
Eigen库使用教程之旋转矩阵,旋转向量和四元数的初始化和相互转换的实现Rotation Matrix To Euler Angles
四元数与欧拉角(RPY角)的相互转换
四元数、欧拉角、旋转矩阵之间互相转换C++源码
中国大学MOOC———《机器人操作系统入门》
三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换
scipy.spatial.transform.Rotatio
Rodrigues into Eulerangles and vice versa
三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换
Eigen学习与使用笔记4
《视觉SLAM十四讲》







评论(0)
您还未登录,请登录后发表或查看评论