

本文参考《Feedback Control of Dynamic Systems -4th》
开环观测器
给定受控对象数学模型:
根据该数学模型建立全阶观测器:



闭环观测器
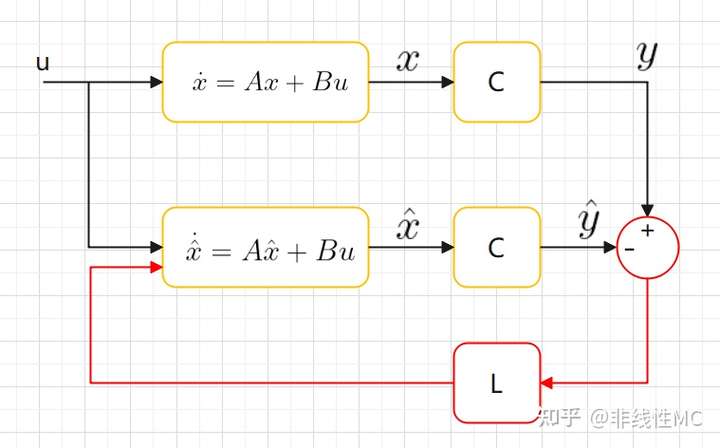
遇事不决用反馈
定义状态估计误差为:
将实测值和估计值的差反馈到输入端,用该估计误差连续不断地修正模型。同时引入比例增益 L :
通过 L调节观测器的动态特性(误差收敛速度)。
建立最终的闭环观测器动态方程:
![[公式]](https://www.zhihu.com/equation?tex=%5Cdot%7B%5Chat%7Bx%7D%7D%3DA%5Chat%7Bx%7D%2BBu%2BL%28y-C%5Chat%7Bx%7D%29%5C%5C) 观测器的零极点配置
观测器的零极点配置
上节讲到通过比例增益L调节观测器动态特性,其实就是通过矩阵L改变闭环观测器的零极点位置:
误差方程:
误差的特征方程:
如果选择 L 使得 A-LC 有稳定且相当快的特征值,那么(实际值-估计值)的误差将衰减到零并保持为零,而且不依赖已知的输入 u(t),同时与状态量的初值x(0) 无关。
增益矩阵 L 的选取与控制律设计中选取K相同,如果规定观测器误差极点的期望位置为:
那么期望的观测器特征方程为
与特征方程联立即可求出增益矩阵 L 。
一个例子
参考书中的例子,给单摆设计一个观测器。计算观测器的增益矩阵,将两个观测器误差极点均放在-10。
给定单摆的运动方程:
设置状态量初值:
引入反馈控制:
将两个观测器误差极点均放在-10,期望的观测器特征方程为:
即增益矩阵 L :
使用Simulink搭建模型,如下图所示:
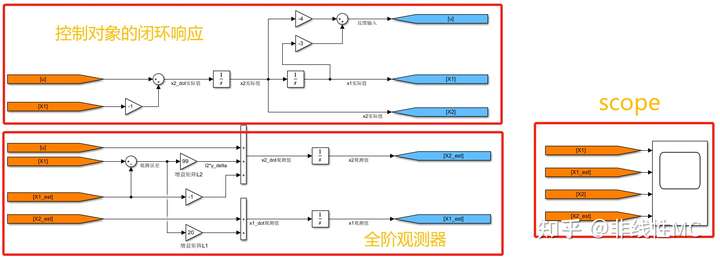
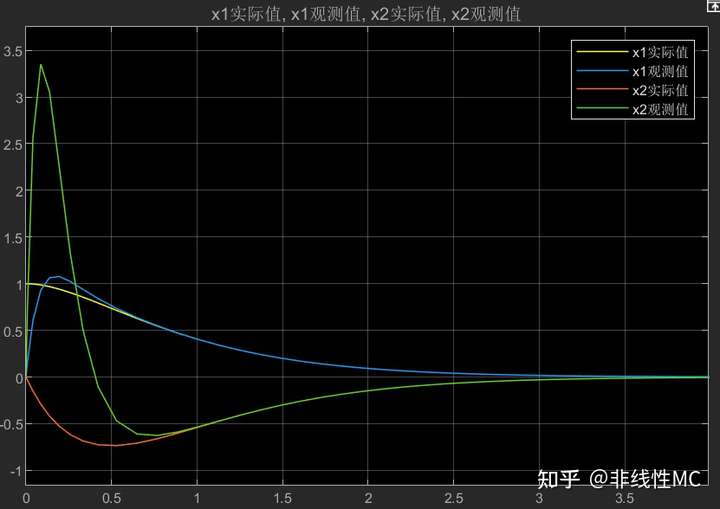
下图为实际值和估计值对比,从图看出,即使状态量初始值有很大的误差,经过一个初始的瞬态过渡,状态估计也会收敛到实际值。观测误差的衰减比闭环对象本身的动态特性快5倍,符合观测器的设计要求。




评论(0)
您还未登录,请登录后发表或查看评论