

关于自动驾驶车道线拟合算法,常用的方法有B样条、三次样条插值、Ransac、最小二乘法等等,但是针对于高精度地图的车道线拟合,由于车道线坐标点已知,所以不需要有控制点进行约束,那么B样条贝塞尔曲线等都不太适合;三次样条插值曲线每两个坐标点都拟合一组参数,如果高精度地图为20cm一个点的画,那么100m的道路一条车道线就将有500组参数,对于性能是不乐观的;而Ransac更适用于散点拟合,对于已知的有序点再进行多次迭代也是耗费性能的,所以目前还是以最小二乘法为主流方案。
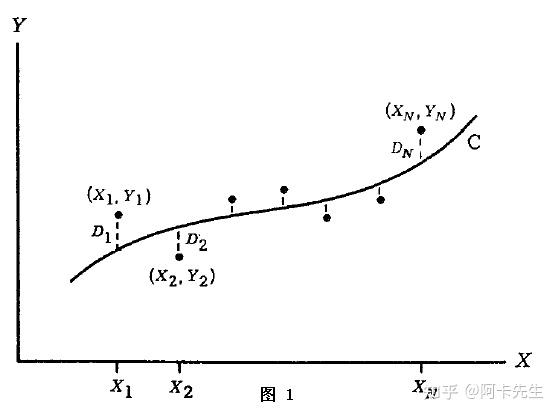
关于普通最小二乘法(Ordinary Least Square,OLS):所选择的回归函数应该使所有观察值的残差平方和达到最小。对于线性一次函数的车道线数据,在拟合函数时,可以先假定函数的通用表达式,一般车道线是以一系列的有序经纬度坐标点集组成。
首先将数据转换为UTM84坐标系后,分为横坐标(自变量)为

,观测值(因变量)为:

目前的主流方法直接用最小二乘法做三次曲线拟合,但本文以引入为主,先以线性最小二乘法引入。假设:
则估计值

使得残差和 最小,表达式如下:

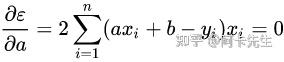
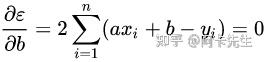
而在自动驾驶中,需要的就是将曲线参数传入控制规划端用以描述道路形状,现阶段主流的拟合方程为一元三次方程,例如MobileEye以C0,C1,C2,C3传出,所以在我们目前的工作中,要做的就是针对点集数据,求出最优参数使得残差最小。由于残差和的表达式是二元函数,因此分别对参数 求偏导,使其等于0时,得到残差和
的最小值。
整理后得

具体推导可以自行百度,就不在此展开了。
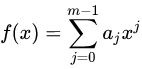
在一次函数的情况下,函数拟合需要计算两个未知量。推广到高阶函数,就需要一个统一公式去做相关运算。
在高阶函数下
同理我们还是有 个自变量
和观测值
不妨将上式写成矩阵形式。
上述矩阵方程记为

观测值 写为向量的形式,记为
同样,使得残差的平方和最小

将上式右半部展开,得:

根据矩阵转置相乘的转换关系,可得:

可以对上式的 所需要求的参数矩阵A 求偏导,使其偏导数为0即可得到最小残差和平方
化简为: ;
根据矩阵的求导法则:

即:
因此残差平方 和对各阶系数
的偏导写为:
化简后,我们得到高阶函数各项系数的最优取值
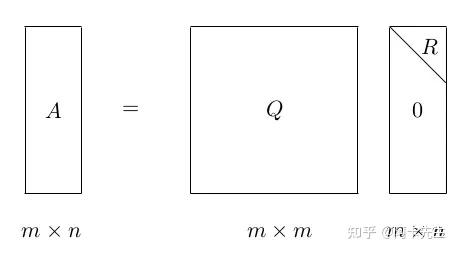
面对线性数学模型,参数矩阵较大时,求逆矩阵的耗时较大,上式的直接求逆可能就略显鸡肋,一般需要通过QR分解、Cholesky分解、SVD分解进行求解。
面对非线性数学模型,无法直接写出导数或者导数过于复杂,也无法用上述矩阵分解的方式求解,所以一般会请来我们认识的雅克比、海塞来求解,目前主流的方法为:最速下降法、牛顿法、高斯牛顿法、LM等等进行迭代求解,也可以依赖ceres库、G2O库进行求解,后面也会依次介绍。
#include <iostream>
#include <Eigen/src/Cholesky/LDLT.h>
Eigen::VectorXd Ls(std::vector<double>& x,std::vector<double>&y)
{
Eigen::Map<Eigen::VectorXd> sampleX(x.data(), static_cast<long>(x.size()));
Eigen::Map<Eigen::VectorXd> sampleY(y.data(), static_cast<long>(y.size()));
Eigen::MatrixXd mtxVandermonde(x.size(), 4);
Eigen::VectorXd colVandermonde = sampleX;
for (int ii = 0; ii < 4; ++ii)
{
if (0 == ii) {
mtxVandermonde.col(0) = Eigen::VectorXd::Constant(static_cast<long>(x.size()), 1, 1);
continue;
}
if (1 == ii) {
mtxVandermonde.col(1) = colVandermonde;
continue;
}
colVandermonde = colVandermonde.array() * sampleX.array();
mtxVandermonde.col(ii) = colVandermonde;
}
Eigen::VectorXd result =(mtxVandermonde.transpose() * mtxVandermonde).inverse() * (mtxVandermonde.transpose()) * sampleY;
return result;
}//代码原文参见
https://zhuanlan.zhihu.com/p/268884807
输出结果后,就得到了数据点拟合曲线的相关参数,即可表达当前道路形状,用于后端控制。
具体使用哪种模型,还是要根据系统的实际需求,有时要求高速的车道线输出,曲率变化小,那用简单的线性模型就好;有些需要精确地道路模型,那就要求三次曲线或二次曲线;有些是视觉车到模型,那就要考虑引用Ransac或者Catmull_Rom样条曲线。总之,在做算法工作时,没有最好的算法,只有最适合的算法。



评论(0)
您还未登录,请登录后发表或查看评论