

上一节 正向运动学
这一节阅读参考书1第5章
概述
符号:
- 向量
- 矩阵
- 导数
, q 指关节角
等同于
在求导公式中指微小的变化
,
,
,
- -------注意:上面关于向量 X 和矩阵 M 的下标与下文中的 X 和 J 不一致。
我们想控制机器手臂到达想要的位置,这个位置用 来表示,其中前三个参数表示位置,后三个参数表示姿态。而我们能控制/能得到的是每个关节处的关节角
那么如何才能根据目标位姿计算关节角? 很简单求逆函数。因为这里
但是,求解
很难,而且有很多种关节角的组合可以到达同一个位姿,这个时候它就不再是一个函数。还有可能无解,即手臂到达不了的位姿。
那么能不能换个思路找到这样一个关系:
即找到位姿的微小变化与关节角微小变化的关系 g ,然后对 g 求逆。(--这个思路的来源是导数的定义。)
根据正向运动学
假设我们可以分布达到目标位姿,即第一步先到达
,第二步到达
,......。即我们把 X 分解为
把 f 分解为
。然后末端执行器有微小的移动的时候,关节角有什么变化呢?
写成矩阵的形式:
其中的 就叫做Jacobian Matrix。这里值得注意的是,雅可比矩阵并不是固定的,它随着当前关节角 q 的改变而改变。这里的巧妙之处在于:由于很难求解 f 的逆函数,转而去求在某一点上 f 的偏导。
是位姿关于关节角的函数,那么
描述的就是速度。所以雅可比矩阵与速度密不可分。
例:
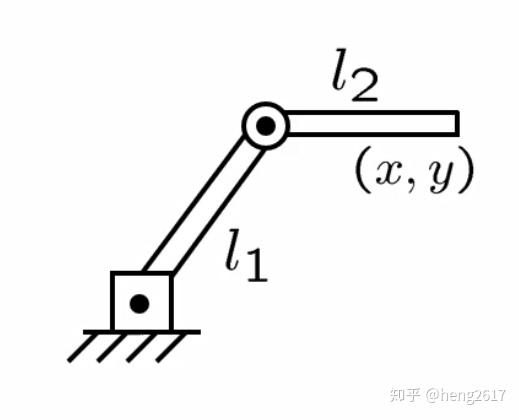
如上图,已知:
那么有:
这里有个很有意思的地方,即该模型初始角度为
,而第一个角速度为0,也就是说它不会动,虽然在现实中,初始角度很难非常精准的等于0,但这也是一个问题。
机器人学中的雅可比一般指雅可比矩阵。
总结
- 在每一个新时刻,如果 q 改变,雅可比矩阵也会改变。雅可比是时变的线性变换
- 雅可比矩阵的行数=操作臂在笛卡尔空间的自由度数量
- 雅可比矩阵的列数=操作臂的关节数量 (更多的列数可能造成冗余)
这里需要讨论 J 的可逆条件:
- 方阵
- 满秩
下一节 雅可比矩阵2



评论(0)
您还未登录,请登录后发表或查看评论