

项目目录
.
├── .vscode
│ ├── launch.json
│ └── setting.json
├── build
├── CMakeLists.txt
├── data
│ └── FeatureLocation8.pcd
├── include
├── NormalEstimation.cpp
└── src
4 directories, 3 files
CMake配置
VScode插件
CMakeLists.txt
cmake_minimum_required(VERSION 2.6 FATAL_ERROR)
project(1_NORMAL_ESTIMATION)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall") # 显示代码警告
set(CMAKE_BUILD_TYPE Debug) # 设置Debug模式,否则无法在断点处停下
find_package(PCL 1.3 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
include_directories(${CMAKE_SOURCE_DIR}/include)
add_executable(NormalEstimation NormalEstimation.cpp)
target_link_libraries(NormalEstimation ${PCL_LIBRARIES})
launch.json
添加launch.json文件: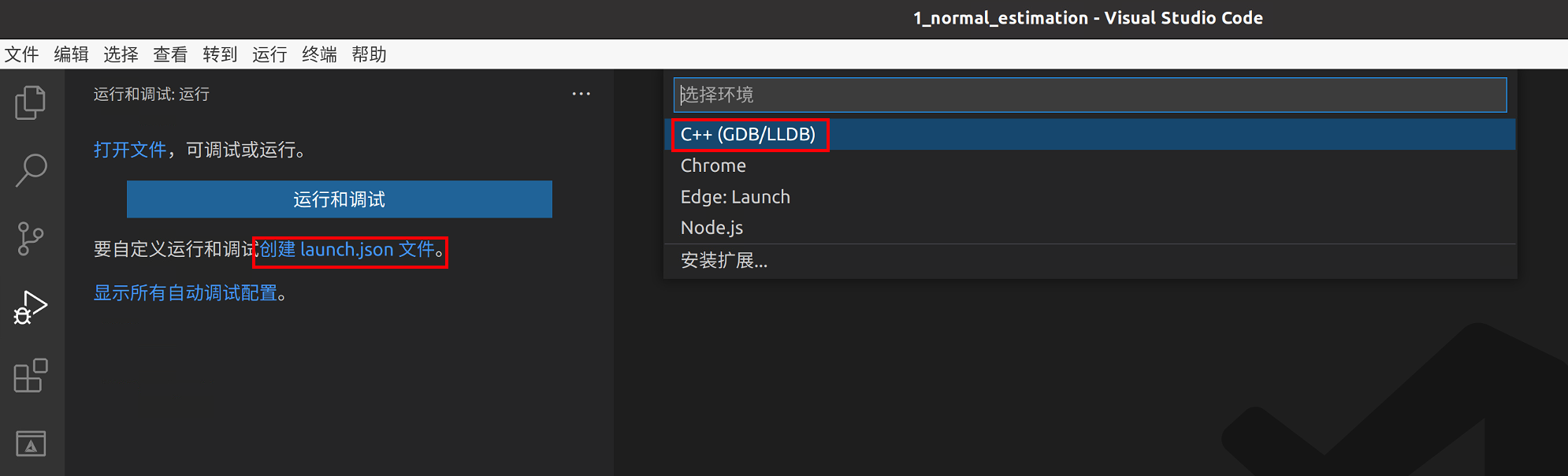
修改launch.json文件的内容后如下图所示: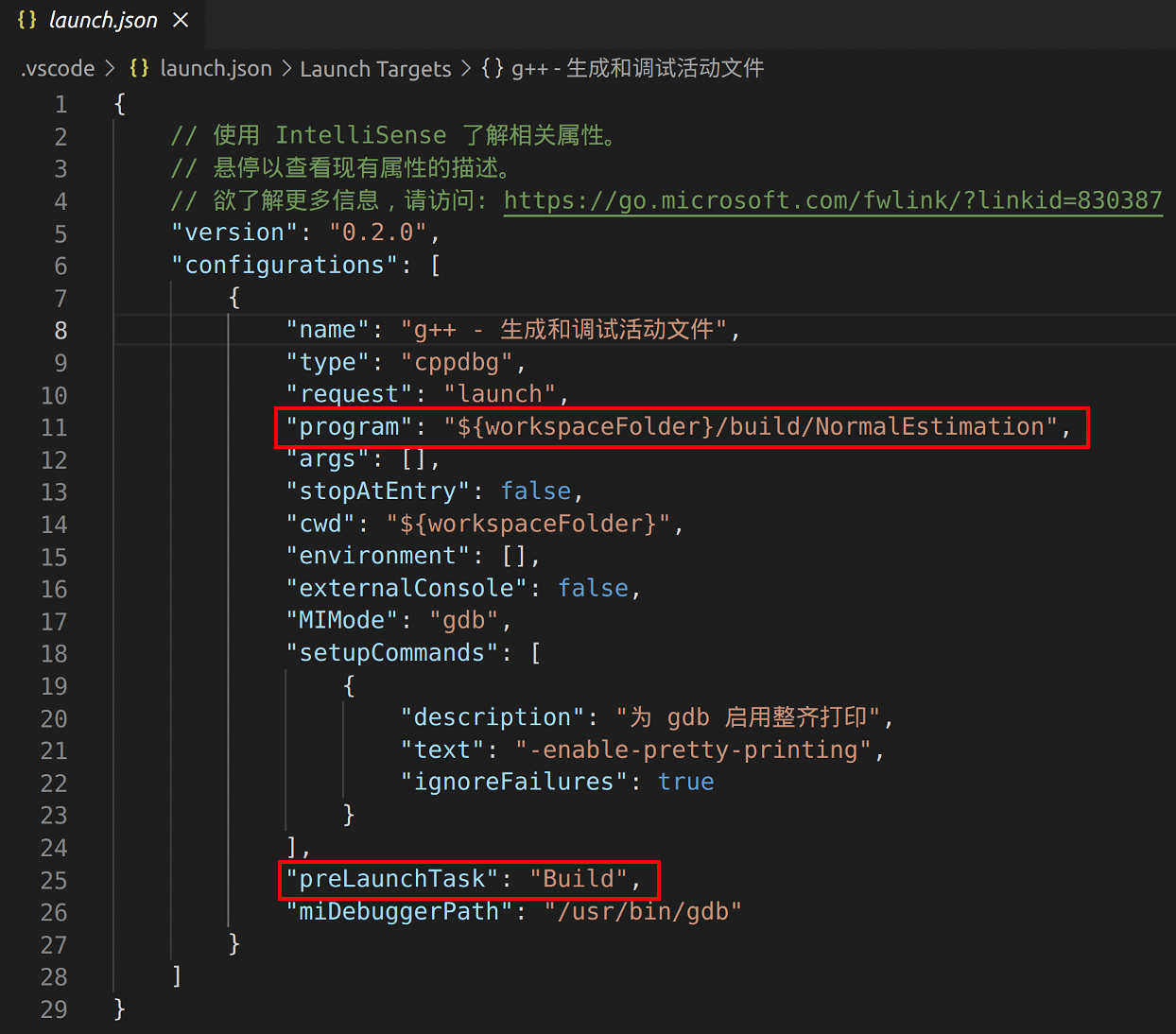
task.json
添加task.json文件: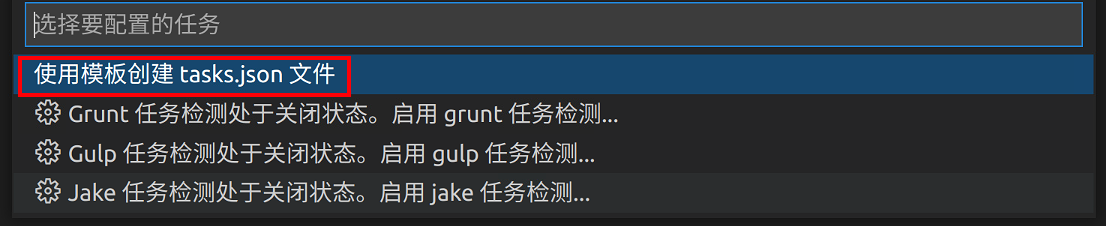

修改tasks.json的内容后如下图所示: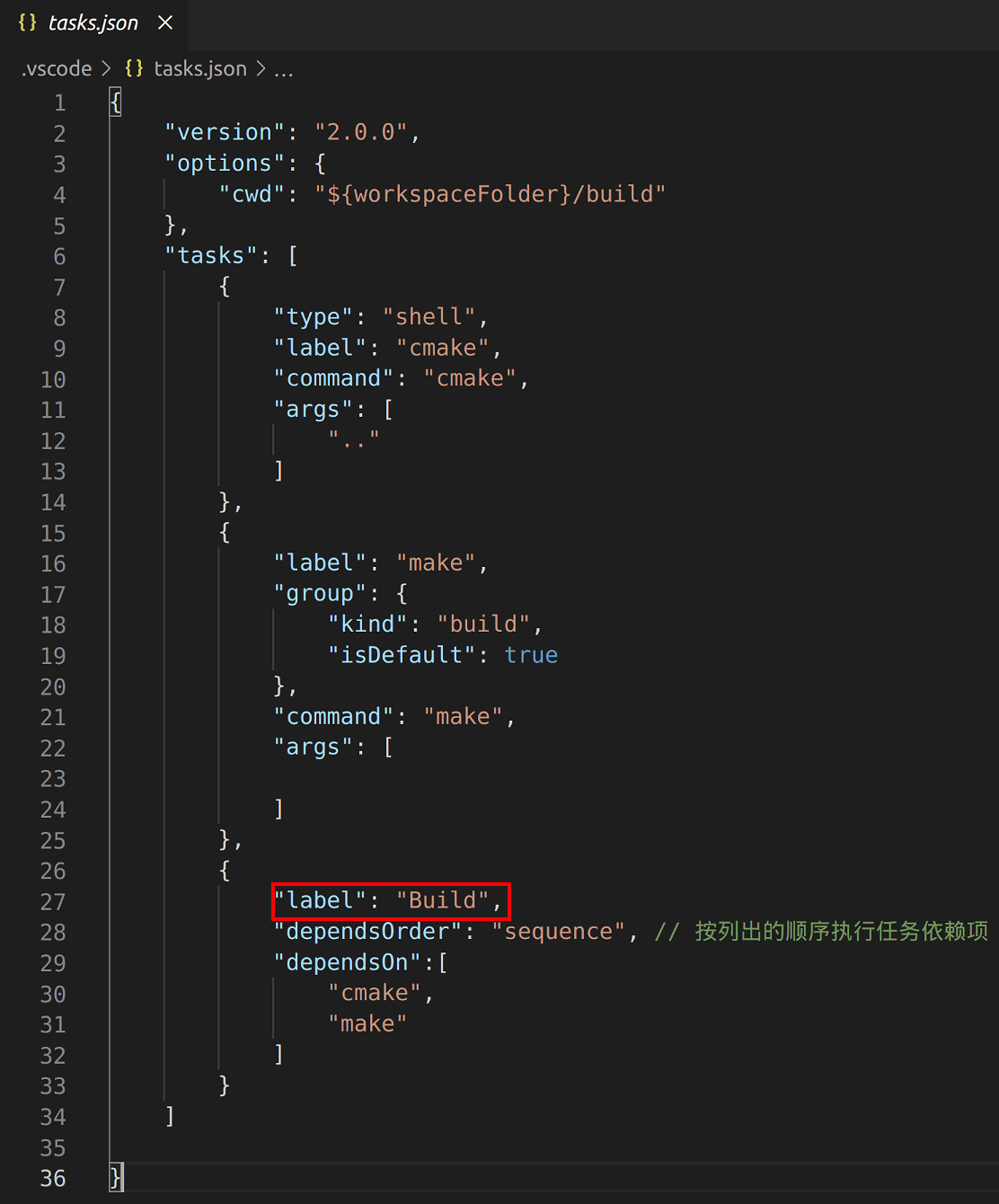
开始调试
设置一个断点: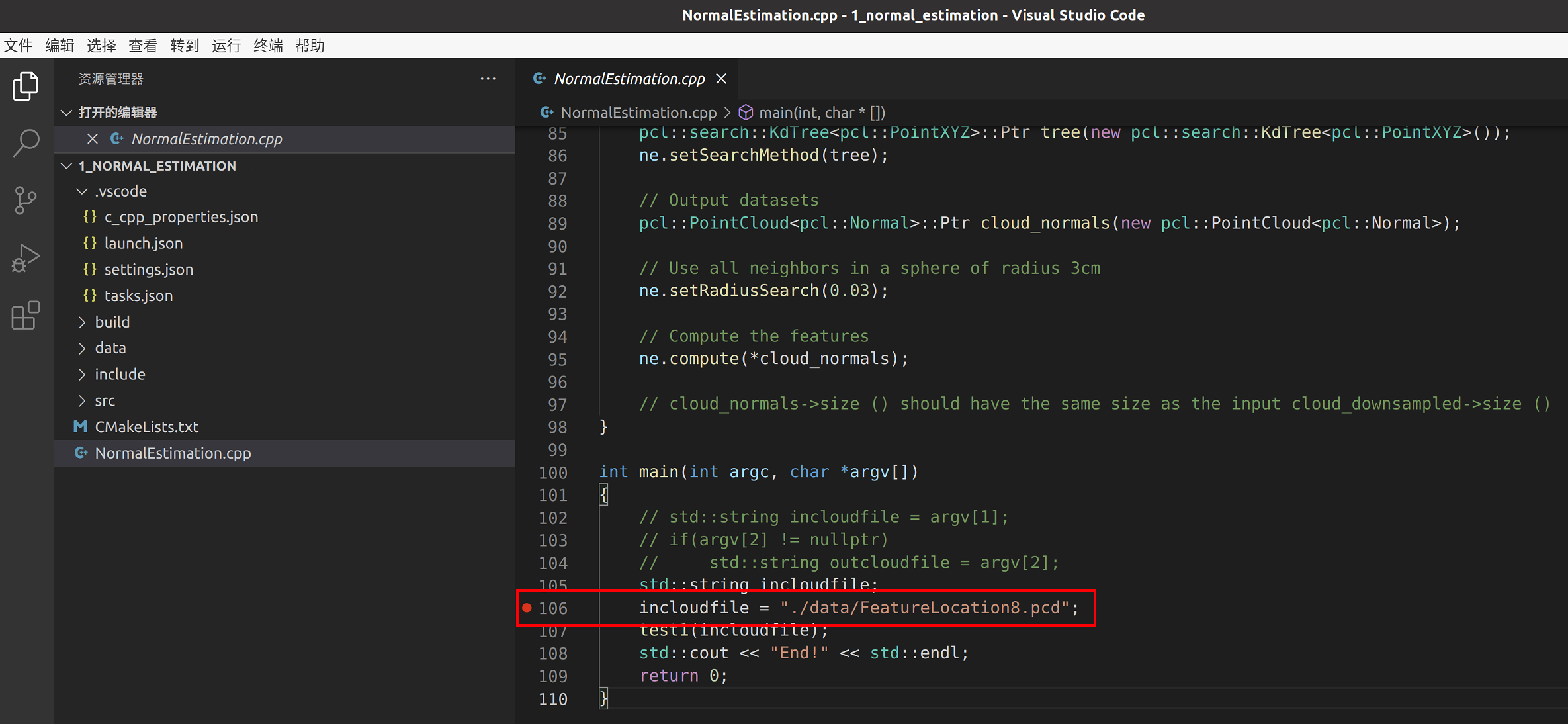
开始调试(快捷键F5):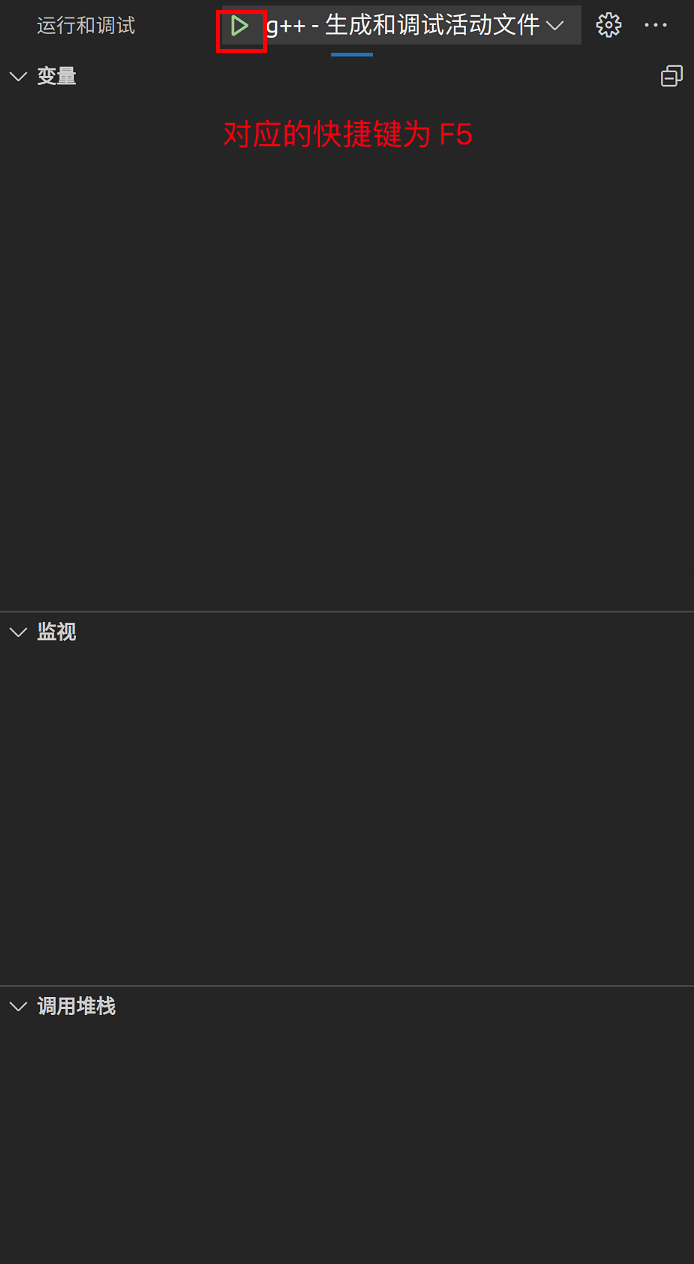
一系列调试按钮:
其他配置
为了能够方便地跳转到PCL库的头文件,可以设置一下c_cpp_properties.json: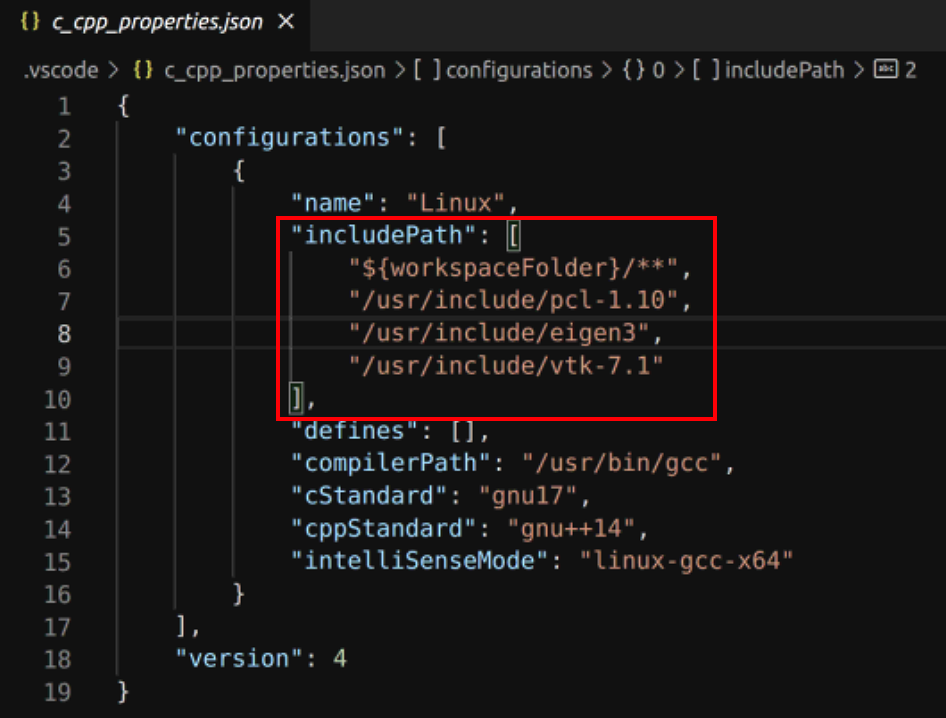
源码
launch.json
{
// 使用 IntelliSense 了解相关属性。
// 悬停以查看现有属性的描述。
// 欲了解更多信息,请访问: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "g++ - 生成和调试活动文件",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/build/NormalEstimation",
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": false,
"MIMode": "gdb",
"setupCommands": [
{
"description": "为 gdb 启用整齐打印",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
],
"preLaunchTask": "Build",
"miDebuggerPath": "/usr/bin/gdb"
}
]
}
task.json
{
"version": "2.0.0",
"options": {
"cwd": "${workspaceFolder}/build"
},
"tasks": [
{
"type": "shell",
"label": "cmake",
"command": "cmake",
"args": [
".."
]
},
{
"label": "make",
"group": {
"kind": "build",
"isDefault": true
},
"command": "make",
"args": [
]
},
{
"label": "Build",
"dependsOrder": "sequence", // 按列出的顺序执行任务依赖项
"dependsOn":[
"cmake",
"make"
]
}
]
}
NormalEstimation.cpp
#include <pcl/point_types.h>
#include <pcl/features/normal_3d.h>
#include <pcl/io/pcd_io.h>
void test1(std::string incloudfile)
{
// Load cloud
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile(incloudfile.c_str(), *cloud);
// Create the normal estimation class, and pass the input dataset to it
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud);
// Create an empty kdtree representation, and pass it to the normal estimation object.
// Its content will be filled inside the object, based on the given input dataset (as no other search surface is given).
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);
// Output datasets
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch(0.03);
// Compute the features
ne.compute(*cloud_normals);
// cloud_normals->size () should have the same size as the input cloud->size ()
}
void test2(std::string incloudfile)
{
// Load cloud
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile(incloudfile.c_str(), *cloud);
// Create a set of indices to be used. For simplicity, we're going to be using the first 10% of the points in cloud
std::vector<int> indices(std::floor(cloud->size() / 10));
for (std::size_t i = 0; i < indices.size(); ++i)
indices[i] = i;
// Create the normal estimation class, and pass the input dataset to it
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud);
// Pass the indices
pcl::shared_ptr<std::vector<int>> indicesptr(new std::vector<int>(indices));
ne.setIndices(indicesptr);
// Create an empty kdtree representation, and pass it to the normal estimation object.
// Its content will be filled inside the object, based on the given input dataset (as no other search surface is given).
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);
// Output datasets
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch(0.03);
// Compute the features
ne.compute(*cloud_normals);
// cloud_normals->size () should have the same size as the input indicesptr->size ()
}
void test3(std::string incloudfile)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_downsampled(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile(incloudfile.c_str(), *cloud);
pcl::io::loadPCDFile(incloudfile.c_str(), *cloud_downsampled);
// Create the normal estimation class, and pass the input dataset to it
pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne;
ne.setInputCloud(cloud_downsampled);
// Pass the original data (before downsampling) as the search surface
ne.setSearchSurface(cloud);
// Create an empty kdtree representation, and pass it to the normal estimation object.
// Its content will be filled inside the object, based on the given surface dataset.
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>());
ne.setSearchMethod(tree);
// Output datasets
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);
// Use all neighbors in a sphere of radius 3cm
ne.setRadiusSearch(0.03);
// Compute the features
ne.compute(*cloud_normals);
// cloud_normals->size () should have the same size as the input cloud_downsampled->size ()
}
int main(int argc, char *argv[])
{
// std::string incloudfile = argv[1];
// if(argv[2] != nullptr)
// std::string outcloudfile = argv[2];
std::string incloudfile;
incloudfile = "./data/FeatureLocation8.pcd";
test1(incloudfile);
std::cout << "End!" << std::endl;
return 0;
}



评论(0)
您还未登录,请登录后发表或查看评论