

目录
- 数据预处理
- 算法流程
- 源码
- [1] 点云转深度图
- [2] 物品分割代码
数据预处理
RGB图像和深度图由Kinect 拍摄,需要转换为点云格式才能输入 PCL 点云库进行处理。为了便于后续的处理,我选择将其转换为有序点云而不是无序点云。代码见文末[1]。
有序点云中存在很多噪声,这些对于分割物体有较大的干扰,在后续的操作中需要进行滤波。
算法流程
整个算法的流程如下图所示: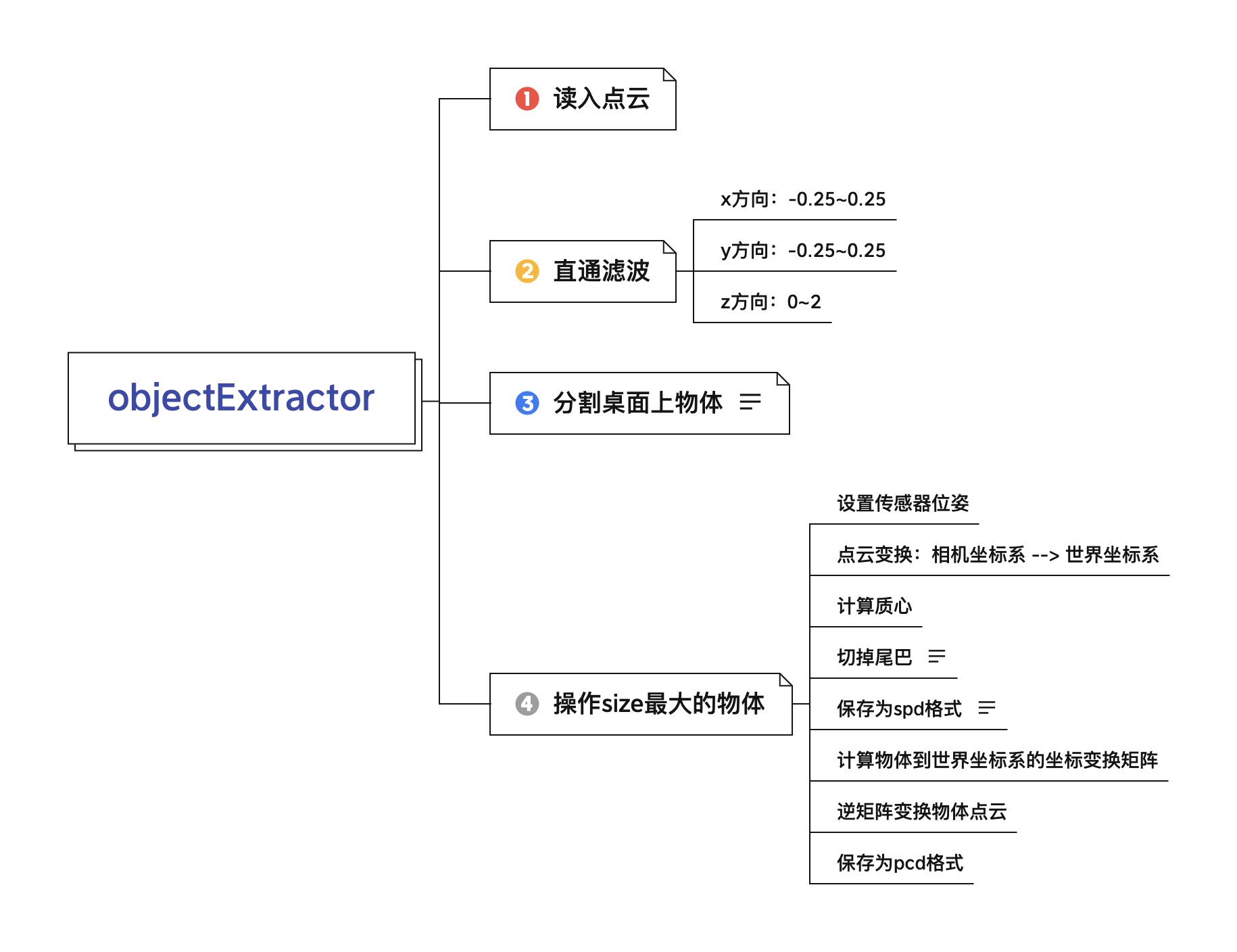

分割结果存在一块缺失的部分,经在其他数据上测试,也会出现这种情况,可能是由于只有单幅点云,单一视角无法完全分割出完整的物品。
源码
[1] 点云转深度图
/*
* @Auther: 宇宙爆肝锦标赛冠军
* @Date: 2022-03-31 10:47:49
* @LastEditors: 宇宙爆肝锦标赛冠军
* @LastEditTime: 2022-04-16 11:17:11
* @Description: 用于将RGB和对应的深度图转换为 xyzrgba 格式有序点云
*/
#include <iostream>
#include <string>
using namespace std;
// OpenCV 库
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
// PCL 库
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
// 定义点云类型
typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloud;
// 相机内参
const double camera_factor = 1000;
const double camera_cx = 314.461;
const double camera_cy = 243.868;
const double camera_fx = 615.316;
const double camera_fy = 614.77;
int main(int argc, char *argv[])
{
// 读取./data/rgb.png和./data/depth.png,并转化为点云
// 图像矩阵
cv::Mat rgb, depth;
rgb = cv::imread(argv[1]); // rgb 图像是8UC3的彩色图像
depth = cv::imread(argv[2], -1); // depth 是16UC1的单通道图像,注意flags设置-1,表示读取原始数据不做任何修改
// 点云变量
// 使用智能指针,创建一个空点云。这种指针用完会自动释放。
PointCloud::Ptr cloud(new PointCloud);
// 遍历深度图
for (int m = 0; m < depth.rows; m++)
for (int n = 0; n < depth.cols; n++)
{
// 获取深度图中(m,n)处的值
ushort d = depth.ptr<ushort>(m)[n];
PointT p;
// 计算这个点的空间坐标
p.z = double(d) / camera_factor;
p.x = (n - camera_cx) * p.z / camera_fx;
p.y = (m - camera_cy) * p.z / camera_fy;
// 从rgb图像中获取它的颜色
// rgb是三通道的BGR格式图,所以按下面的顺序获取颜色
p.b = rgb.ptr<uchar>(m)[n * 3];
p.g = rgb.ptr<uchar>(m)[n * 3 + 1];
p.r = rgb.ptr<uchar>(m)[n * 3 + 2];
// 把p加入到点云中
cloud->points.push_back(p);
}
// 设置并保存点云
cloud->height = depth.rows;
cloud->width = depth.cols;
cout << "point cloud size = " << cloud->points.size() << endl;
cloud->is_dense = false;
pcl::io::savePCDFile("result.pcd", *cloud);
// 清除数据并退出
cloud->points.clear();
cout << "Point cloud saved." << endl;
return 0;
}
[2] 物品分割代码
/*
* @Auther: 宇宙爆肝锦标赛冠军
* @Date: 2022-03-31 09:54:41
* @LastEditors: 宇宙爆肝锦标赛冠军
* @LastEditTime: 2022-03-31 14:41:23
* @Description: 对桌面上的物品进行分割
*/
#include <pcl/features/moment_of_inertia_estimation.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/passthrough.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/PointIndices.h>
#include <pcl/common/transforms.h>
#include <pcl/point_types.h>
#include <pcl/apps/impl/dominant_plane_segmentation.hpp>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/features/moment_of_inertia_estimation.h>
#include <vector>
using namespace std;
using namespace pcl;
typedef pcl::PointXYZRGBA PointT;
typedef vector<pcl::PointCloud<PointT>::Ptr> PointCloudVector;
typedef boost::shared_ptr<PointCloudVector> PointCloudVectorPtr;
const double depthK[] = { 418.7550354003906, 0.0, 427.534423828125,
0.0, 418.7550354003906, 240.6034698486328,
0.0, 0.0, 1.0 };
const double colorK[] = { 917.871337890625, 0.0, 646.165771484375,
0.0, 918.4445190429688, 379.54443359375,
0.0, 0.0, 1.0 };
pcl::PointCloud<PointT>::Ptr transformCamera2World(pcl::PointCloud<PointT>::Ptr cloud_in)
{
auto p = cloud_in->sensor_origin_;
auto o = cloud_in->sensor_orientation_;
Eigen::Matrix4f trans2 = Eigen::Matrix4f::Identity();
trans2.block(0, 0, 3, 3) = o.toRotationMatrix();
trans2.block(0, 3, 3, 1) = Eigen::Vector3f(p.x(), p.y(), p.z());
pcl::PointCloud<PointT>::Ptr cloud_out(new pcl::PointCloud<PointT>);
pcl::transformPointCloud(*cloud_in, *cloud_out, trans2);
return cloud_out;
}
pcl::PointXY framePC2RGB(PointT point)
{
pcl::PointXY pout;
pout.x = point.x * colorK[0] / point.z + colorK[2];
pout.y = point.y * colorK[4] / point.z + colorK[5];
return pout;
}
pcl::PointXY framePC2D(PointT point)
{
pcl::PointXY pout;
pout.x = point.x * depthK[0] + point.z * depthK[2];
pout.y = point.y * depthK[4] + point.z * depthK[5];
return pout;
}
class ObjectExtractor
{
protected:
public:
// 直通滤波,去除背景
PointCloud<PointT>::Ptr passThrough(PointCloud<PointT>::Ptr cloud_in)
{
cout << "passThrough..." << endl;
PointCloud<PointT>::Ptr cloud_out(new pcl::PointCloud<PointT>);
// std::vector<int> nan_indices;
// removeNaNFromPointCloud(*cloud_in,*cloud_out,nan_indices);
PassThrough<PointT> pass;
pass.setInputCloud (cloud_in);
pass.setFilterFieldName ("z");// Z轴
pass.setFilterLimits (0, 2);// 范围
pass.setKeepOrganized(true);
pass.filter (*cloud_out);
const double xylimit = 0.25;
pass.setInputCloud (cloud_out);
pass.setFilterFieldName ("x");// Z轴
pass.setFilterLimits (-xylimit, xylimit);// 范围
pass.setKeepOrganized(true);
pass.filter (*cloud_out);
pass.setInputCloud (cloud_out);
pass.setFilterFieldName ("y");// Z轴
pass.setFilterLimits (-xylimit, xylimit);// 范围
pass.setKeepOrganized(true);
pass.filter (*cloud_out);
cout << "PointCloud after filtering has: " << cloud_out->points.size () << " data points." << endl;
// pcl::io::savePCDFile(save_dir + "/" + string("1-pass-through-filtered.pcd"), *cloud_out);
// viewPCD(cloud_out, "cutted pcd");
return cloud_out;
}
// 物体分割
PointCloudVectorPtr segementOnTableCluster(PointCloud<PointT>::Ptr cloud_in)//对桌面上物体进行分割
{
cout << "segementOnTableCluster..." << endl;
PointCloudVectorPtr clouds_out(new PointCloudVector);
apps::DominantPlaneSegmentation<PointT> dps;
dps.setInputCloud (cloud_in);
dps.setMaxZBounds (1.5); //z方向范围
dps.setObjectMinHeight (0.01);
dps.setMinClusterSize (500);
dps.setWSize (5);
dps.setDistanceBetweenClusters (0.02f);
dps.setSACThreshold(0.005);
std::vector<pcl::PointIndices> indices_;//分割物体索引
Eigen::Vector4f table_plane_;//桌面方程参数abcd
//dps.setDownsamplingSize (0.005f);
dps.compute_fast (*clouds_out);
dps.getIndicesClusters (indices_);
dps.getTableCoefficients (table_plane_);
return clouds_out;
}
//计算重心
Eigen::Vector4f computeCentroid(pcl::PointCloud<PointT>::Ptr cloud_in)
{
Eigen::Vector4f centroid;
pcl::compute3DCentroid(*cloud_in, centroid);
std::cout << "The centroid are: ("
<< centroid[0] << ", "
<< centroid[1] << ", "
<< centroid[2] << ")." << std::endl;
return centroid;
}
pcl::PointCloud<PointT>::Ptr loadPCD(string pcd_file)
{
pcl::PointCloud<PointT>::Ptr cloud (new pcl::PointCloud<PointT>);
if (pcl::io::loadPCDFile<PointT>(pcd_file, *cloud) == -1)
{
std::cout << "Cloud reading failed." << std::endl;
return nullptr;
}
return cloud;
}
void viewPCD(pcl::PointCloud<PointT>::Ptr cloud_in, string name = "")
{
pcl::visualization::CloudViewer viewer(name);
viewer.showCloud(cloud_in);
while (!viewer.wasStopped());
}
void savePCD(pcl::PointCloud<PointT>::Ptr cloud, string fpout)
{
pcl::io::savePCDFile(fpout, *cloud);
}
void saveSPD(pcl::PointCloud<PointT>::Ptr cloud, string fpout)
{
ofstream fout(fpout);
for (auto &point : cloud->points)
{
fout << point.x << " " << point.y << " " << point.z << " "
<< (uint)point.r << " " << (uint)point.g << " " << (uint)point.b << endl;
}
fout.close();
}
// 去掉由于相机失真造成的“尾巴”,方向应随实际情况而定,本实验中相机是沿y轴正方向的。
pcl::PointCloud<PointT>::Ptr cutTail(pcl::PointCloud<PointT>::Ptr cloud, Eigen::Vector4f centroid)
{
pcl::PointCloud<PointT>::Ptr cloud_out(new pcl::PointCloud<PointT>);
for (auto &point : cloud->points)
{
if (point.z > centroid.z() || point.y < centroid.y() + 0.02)
cloud_out->push_back(point);
}
return cloud_out;
}
// 计算物体到世界坐标系的坐标变换矩阵
Eigen::Matrix4f computeH_model2world(pcl::PointCloud<PointT>::Ptr cloud, vector<double> modelParams, float & factor)
{
std::vector <float> moment_of_inertia;
std::vector <float> eccentricity;
PointT min_point_OBB;
PointT max_point_OBB;
PointT position_OBB;
Eigen::Matrix3f rotational_matrix_OBB;
float major_value, middle_value, minor_value;
Eigen::Vector3f major_vector, middle_vector, minor_vector;
Eigen::Vector3f mass_center;
// 计算物体参数
pcl::MomentOfInertiaEstimation<PointT> feature_extractor;
feature_extractor.setInputCloud(cloud);
feature_extractor.compute ();
feature_extractor.getMomentOfInertia (moment_of_inertia);
feature_extractor.getEccentricity (eccentricity);
feature_extractor.getOBB (min_point_OBB, max_point_OBB, position_OBB, rotational_matrix_OBB);
feature_extractor.getEigenValues (major_value, middle_value, minor_value);
feature_extractor.getEigenVectors (major_vector, middle_vector, minor_vector);
feature_extractor.getMassCenter (mass_center);
// 这部分的坐标关系把我自己都绕晕了,总之结果是对的。(我不懂但它跑起来了.jpg)
Eigen::Matrix4f H_model2world;
H_model2world.setIdentity();
H_model2world.block(0, 0, 3, 1) = major_vector; // x为最长轴
H_model2world.block(0, 1, 3, 1) = middle_vector;
H_model2world.block(0, 2, 3, 1) = minor_vector;
// H_model2world.block(0, 0, 3, 3) = rotational_matrix_OBB;
// H_model2world.block(0, 3, 3, 1) = position_OBB.getVector3fMap() + min_point_OBB.getVector3fMap();
Eigen::Vector4f max_point = H_model2world.transpose() * max_point_OBB.getVector4fMap();
Eigen::Vector4f min_point = H_model2world.transpose() * min_point_OBB.getVector4fMap();
cout << "max_point_OBB = " << max_point_OBB.getVector3fMap().transpose() << endl;
cout << "min_point_OBB = " << min_point_OBB.getVector3fMap().transpose() << endl;
cout << "max_point = " << max_point.transpose() << endl;
cout << "min_point = " << min_point.transpose() << endl;
H_model2world.block(0, 3, 3, 1) = position_OBB.getVector3fMap();
if (max_point.x() < 0)
{
H_model2world.block(0, 0, 3, 3) = H_model2world.block(0, 0, 3, 3) * Eigen::AngleAxisf(M_PI, Eigen::Vector3f::UnitZ()).matrix();
max_point = H_model2world * max_point_OBB.getVector4fMap();
}
// 这里需要补充一个方法确定物体的方向,理论上这段代码无法保证方向是正确的
Eigen::Matrix4f H_tmp;
H_tmp.setIdentity();
H_tmp.block(0, 3, 3, 1) = min_point_OBB.getVector3fMap();
H_model2world = H_model2world * H_tmp;
// 实物与模型大小不同,因此计算一个缩放倍数
Eigen::Vector3f max_point3 = max_point_OBB.getVector3fMap();
float d = max_point3.maxCoeff() * 2;
factor = 1/d;
return H_model2world;
}
static double gaussianF(double x, double u, double sigma2)
{
return 1.0 / sqrt(2 * 3.1415927 * sigma2) * expf(-pow(fabs(x - u), 2) / (2 * sigma2));
}
static double GMMF(double x, vector<double> weights, vector<double> means, vector<double> sigma2s)
{
double prob = 0;
for (int i = 0; i < means.size(); ++i)
prob += gaussianF(x, means[i], sigma2s[i]) * weights[i];
return prob;
}
pcl::PointCloud<PointT>::Ptr renderGMM(pcl::PointCloud<PointT>::Ptr cloud, float factor, vector<double> weights, vector<double> means, vector<double> sigma2s)
{
pcl::PointCloud<PointT>::Ptr cloud_out(new pcl::PointCloud<PointT>);
// int i = 0;
// ofstream fout("test.txt");
for (auto point : cloud->points)
{
// ++i;
float prob = GMMF(point.x * factor, weights, means, sigma2s);
// fout << prob << " ";
// if (!(i%100))
// cout << "point.x = " << point.x * factor << endl;
prob = (prob/2 < 1) ? prob/2 : 1;
Eigen::Vector3f white(255, 255, 255);
Eigen::Vector3f red(255, 0, 0);
Eigen::Vector3f srcColor(point.getRGBVector3i()[0], point.getRGBVector3i()[1], point.getRGBVector3i()[2]);
Eigen::Vector3f color = white * (1-prob) + red * prob;
// cout << "color = " << color.x() << ", " << color.y() << ", " << color.z() << endl;
point.r = color.x();
point.g = color.y();
point.b = color.z();
cloud_out->push_back(point);
}
// fout.close();
return cloud_out;
}
};
ObjectExtractor *extractor;
int main(int argc, char **argv)
{
clock_t start_time, end_time;
start_time = clock();
pcl::PointCloud<PointT>::Ptr cloud(new PointCloud<PointT>);
cloud = extractor->loadPCD(argv[1]);
cout << "读取点云: " << cloud->width << ", " << cloud->height << endl;
auto p = cloud->sensor_origin_;
auto o = cloud->sensor_orientation_;
cloud = extractor->passThrough(cloud);
// extractor->viewPCD(cloud, "passThrough.pcd");
extractor->savePCD(cloud, "passThrough.pcd");
// extractor->savePCD(cloud, req.outputDir + "/passThrough.pcd");
PointCloudVectorPtr objects;
objects = extractor->segementOnTableCluster(cloud);
cout << "共分割出:" << objects->size() << "个物体" << endl;
pcl::PointCloud<PointT>::Ptr object = (*objects)[0];
for (auto &object0 : *objects)
{
if (object0->size() > object->size())
object = object0;
}
object->sensor_origin_ = p;
object->sensor_orientation_ = o;
object = transformCamera2World(object);
// extractor->viewPCD(object);
auto centroid = extractor->computeCentroid(object);
object = extractor->cutTail(object, centroid);
// extractor->viewPCD(object);
// extractor->savePCD(object, req.outputDir + "/object.pcd");
extractor->savePCD(object, "object.pcd");
// extractor->saveSPD(object, "object.spd");
float factor;
vector<double> objectParams, Gaussian_Weights, Gaussian_Means, Gaussian_Sigma2s;
auto H_model2world = extractor->computeH_model2world(object, objectParams, factor);
PointCloud<PointT>::Ptr objectROI(new PointCloud<PointT>);
pcl::transformPointCloud(*object, *objectROI, H_model2world.inverse());
objectROI = extractor->renderGMM(objectROI, factor, Gaussian_Weights, Gaussian_Means, Gaussian_Sigma2s);
// extractor->viewPCD(objectROI);
extractor->savePCD(objectROI, "objectROI.pcd");
end_time = clock();
std::cout << "Total time: " << (double)(end_time - start_time) / CLOCKS_PER_SEC << "s" << std::endl;
return 0;
}



评论(2)
您还未登录,请登录后发表或查看评论