

背景:
colmap下进行三维重建可以利用最小割将图片分块,局部进行重建,利用分布式可以加速此流程。
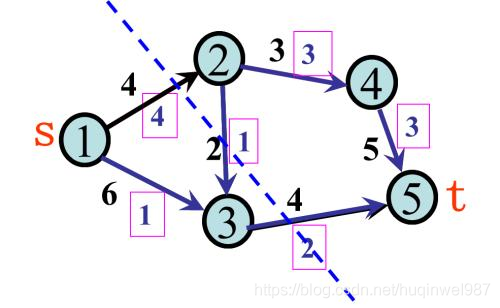
最小割简单示意:
s为起点,t为终点,阻断s到t的流量的代价最小的割的集合,叫做最小割。
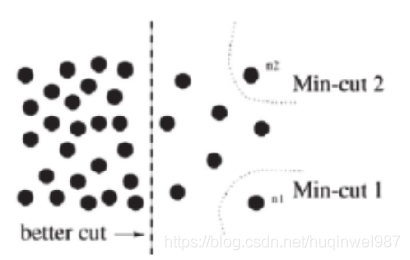
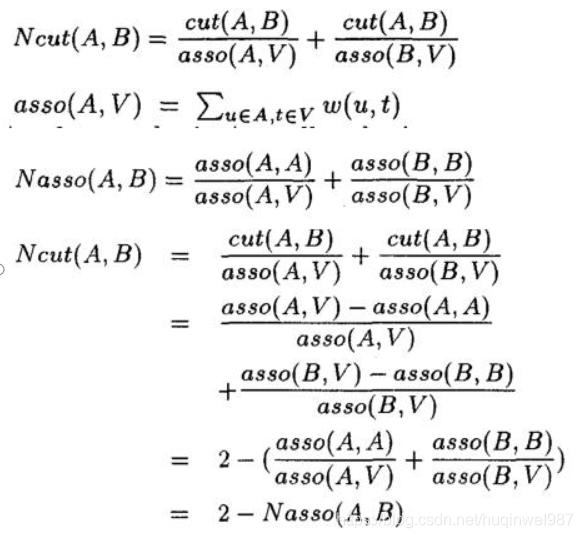
normalized N cut
带权重的最小割,因为实际graph中没有s和t,如果只想把整个graph切成两部分,就可能出现下图min-cut 1和min-cut 2。
引入normalized约束就是为了让两块更均匀(better cut)
分块更“均匀”的目的:
意味着分块过程更倾向于n变成2个n/2,而不是n-1和1,因为1是没法去重建的,而n-1也无法获得加速效果。综合来讲,不合理的切割会导致既不能加速,又会丢图(太小没法用)。
而且分块重建最终不可避免的需要分块合并,需要把分开重建的两个区域拉回到一起,所以每个独立的块需要结构更鲁棒,内部结构更明确,外部要与其他块有明显关联。
所以目的明确了,需要产生,更加左右平衡,更加互相关联度大的小块。
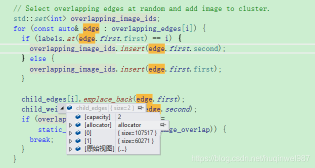
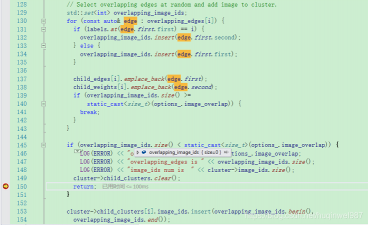
最小割的问题与分块功能优化:
实际的分块逻辑直接调用normalized N cut后仍然会有很多问题,因为最小割不会考虑三维重建业务本身,所以切割出来的东西并不会特别“关照”,会有很多不符合需求的问题产生。
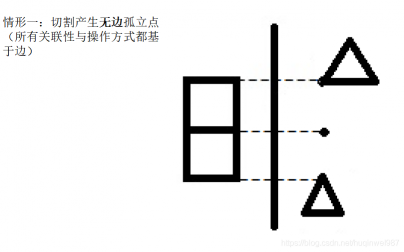
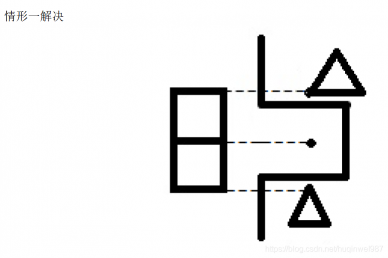
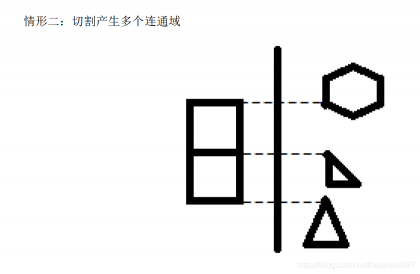
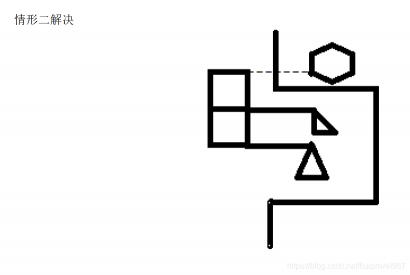
三维重建中,graph的edge存储形式是图像间的匹配性,weight是图像间匹配对的个数。除此没有任何关联。当最小割“自由发挥”时,可能会产生凸点问题和多连通域问题,这两个问题会因数据丢失导致二分切割无法继续下去。
对此,做了两个小优化:
对比航拍倾斜摄影与地面街景采集:
1.倾斜摄影建模或产出点云容易,相对比下,街景数据(360全景相机采集加工)则比较难(尤其是环形绕障碍物采集的AR数据,两条航带隔着大规模障碍物,无关联度。)
2.除了点云产出质量,还有一个速度问题,利用最小割讲所有图片关联组成的图结构切割,利用分布式分块进行重建,会提速很多,但是倾斜摄影产生的图结构,关联度是可以很大的。拓扑结构是网状的(并且是可以交叉重叠的网)几刀下去,还是会有一定的关联度;而360°街景(中间带建筑物)采集出来的街景是环形拓扑结构,一刀下去就那两个边有流量(最小割)。
直觉上,倾斜摄影在高空,能跨航带重叠,并且因为五机位+倾斜度,实际重叠度会更大。
而360°街景为地面采集数据,重叠度对采集方式敏感,在工程化加工时(区域分块重建)会发生很多问题。
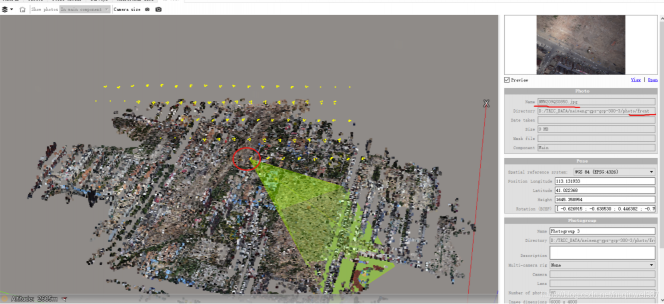
倾斜摄影关联度如图(image_id)
通过image——id查询db对应图片路径进行分析

拓扑关系如图:
星型结构,并且中心一点的区域会产生很大跨度的立体网状连结。
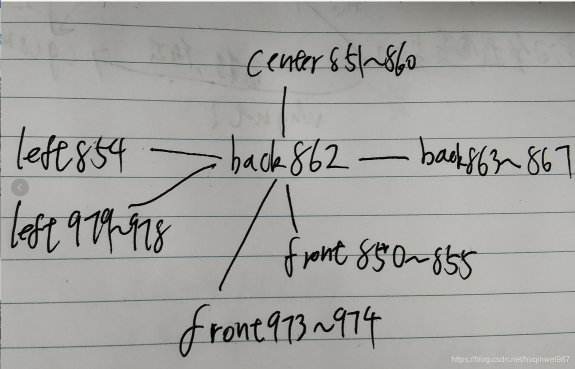
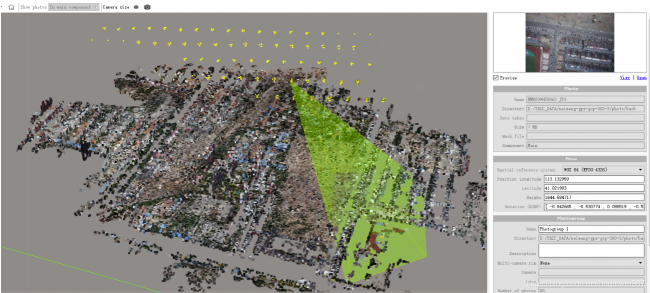
back 862对应球场位置

用图片路径在cc中查找相机
横向第二“航带"第五机位
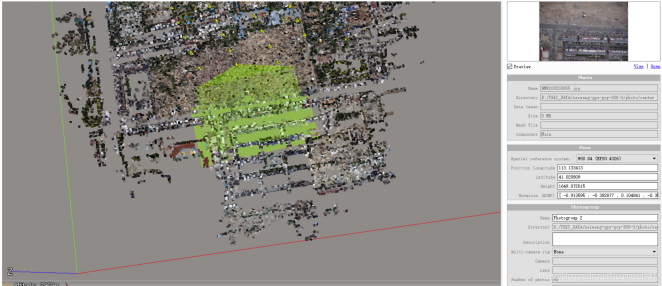
第二航带第一机位
横向第四"航带"
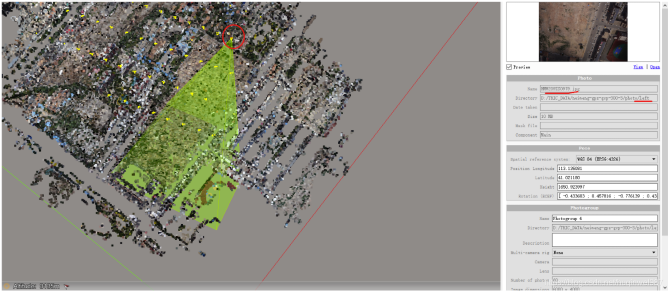
纵向,第八个机位
这是AR数据:
环形拓扑结构的一个典型节点,前后关联都很线性。
(每一个点都前后有十几二十个点的链接,不是严格的”窄“环,但是整体结构呈环状,只要足够窄,切割后关联度太低,也是无法进行分块的合并的)

我用一个网络拓扑结构来说明:航空倾斜摄影就像最左侧,街景采集就像最右侧,无论怎么加粗,都是一个环形,都很脆弱,切割之后变成圆弧,圆弧结构脆弱,且无法回环检测。

这种环形拓扑结构切割很看运气,极端条件下,16万条边,切割完成后,两边的交界处overlapping直接为零,两区域关联度为0,切割失败(无法利用多视角进行分块合并)
结论:
倾斜摄影,横纵跨度大,关联度高。back 862已属角落,若选取中心区域摄影,会产生更高重叠度。
对比:
AR PURAN数据(绕圈采集,并且圈内是实墙障碍):1/1.jpg只与后续1/2.jpg~1/29.jpg有关联,是线性结构,而非S型网状结构。
这种环形拓扑结构切割很看运气,如果刚好数据密度和关联性差,而最小割一定就取最小关联度的点去切,势必导致切割之后失去关联度。要求全局数据密度合理,运气好,才能切割。
并且1/1.jpg与2/1.jpg关联,与5/1.jpg关联,认为裁剪存在问题。
补充:环形结构一刀下去就是一条完全的线了,弯曲的线不能完成闭环检测,即使勉强去重建,也会是发飘的结构,有累积误差。
附:街景采集效果图



评论(0)
您还未登录,请登录后发表或查看评论