

更新:对于特征匹配和三维重建的影响,下列所有因素都只是量变,根本因素是拼接和裁剪造成的各种畸变,后续会把新实验结果放上来。
稀疏重建中,航空倾斜摄影效果较好,主要源于视角统一,高空俯瞰。星型网状的拓扑结构,源于跨航带跨图片的远距离关联性与较好的回环检测。
而街景较为单一,地面视角,朝左和朝右并不能重叠。采用绕圈对向采集,利用去程的左和返程的右视角额外补充匹配效果,不过景深变化过大,匹配难度大。下面做简单分析。
主要分析稀疏重建失败都受到哪些因素干扰,并指导采集方案。
采集低点为南锣鼓巷。
采集设备为insta onex360。
采集时间为正午12点。
重建结果,道路分层,分叉,穿墙,无法重建。
下面从特征匹配角度寻找数据采集问题。
三种匹配实验:
1.同相机不同帧
2.相邻相机同帧
3.不同相机同一地点(往-返)
ransac 8像素(tric默认3像素)
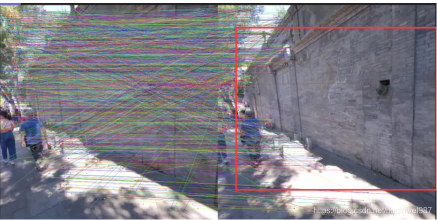
同相机不同帧匹配:(实验ransac 8像素)(未过滤内点实验)

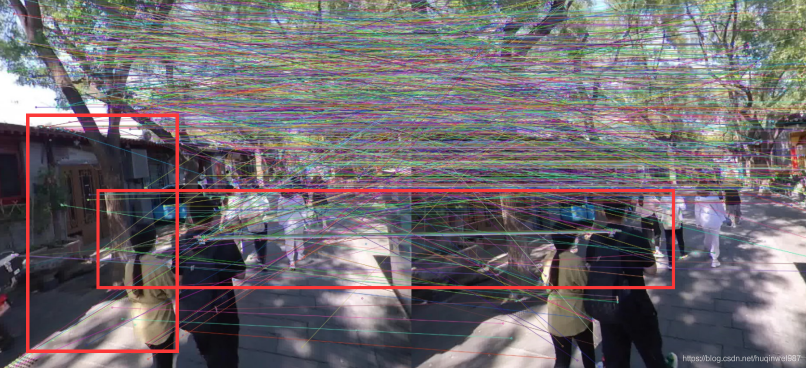

结论:阴影处特征不明显,且人群干扰大
相机3不同帧匹配(过滤内点)
阴影、灰墙、黑洞、玻璃匹配较少
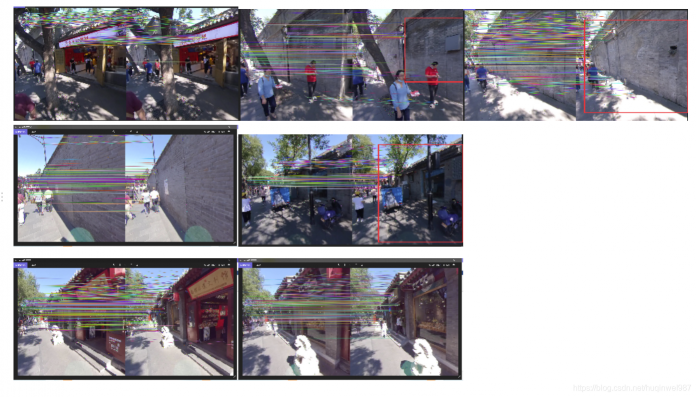
内点优化后,匹配中人物干扰同样存在(ransac8情况下,对整体的影响大小未知)
ransac3(干扰降低,但仍然存在)
近景遮挡较大,匹配较差

相机2不同帧匹配
考虑2帧之间有0.5秒间隔,两图边缘范围有差异,不会产生匹配对。
但是实际不会产生如此大范围的差异,所以确定是特征问题,而不是帧之间的区别。
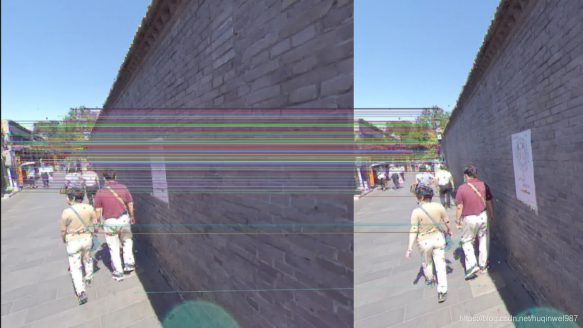
阴影灰墙,相机3、4不同帧匹配(同向行走)
万庆字样
3/65与4/78两张照片,前后各取10张,共100次匹配实验。
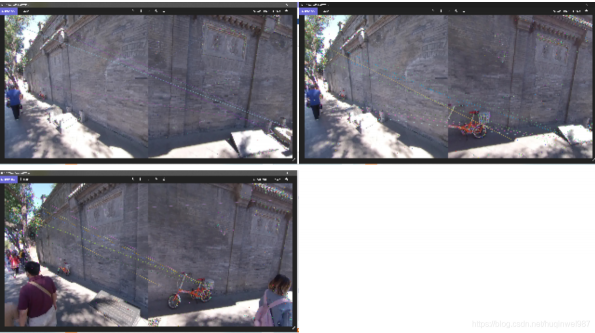
实测没有理想匹配,右侧牌匾有特征点,左侧没有(对向数据没有采集,无法对比)
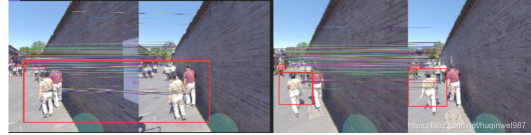
对向采集分析

内点过滤:
结论:匹配对过少,且左侧图片前后多张照片下只有个别图匹配最好,其他的可能只有玻璃,看不到牌匾和房檐。

结论:
硬件层面:曝光强烈,分辨率低,抖动导致模糊。如果有条件,绑定云台可能会更好,号称防抖的全景相机,5.7k,高亮度场景,裁剪下来,成像质量其实很堪忧。此外,调整曝光等也是可选的操作(针对强光下亮暗对比明显的情况)。
畸变!畸变!畸变!重要的事情说三遍,360采用两个鱼眼拼接出全景视频与图像,本例利用openMVG_sample_pano_converter对原图进行切割,典型的输出是FOV80*5张图。也有FOV120的实验。显然,FOV越大,畸变越大,FOV越小,画幅越小,在这样一个场景下(特征相比其他街面和光影更差),畸变导致的本应匹配的特征对丢失也很常见。
相机视角有旋转,路线不严格循环,不利于数据分析。
航空倾斜摄影和地面采集有所不同,但用来跑模型的ransac参数固定,这是不科学的,需要额外调参(按理说街景ransac需要的容忍像素误差更大,但是还是需要内点过滤,不然匹配噪音太大)。
景深很重要,南锣鼓巷太窄也是一个不利于重建的重要因素,弥补方法是增加不同高度和不同倾角采集,补足个别区域短板。
特征匹配方面,样本中,主要匹配地物:人、树木、房檐。
匹配差的:白墙、阴影、开门、玻璃、高亮下地面、相机太近太低。
建议:
0.改ransac参数跑
1.更高位置的倾斜摄影采集配合低位置的默认采集(这个没有普适性,就是很针对这个“南锣鼓巷”数据集)
2.在开业之前采集。(开门问题)
3.不在正午高亮时间采集(灰墙与阴影问题)
4.避开人群采集(备选方案:变速采集,不与人群同速)
5.多采集房檐与树木(如果3有改善,不作为必选)
6.相机左右朝向稳定(鱼眼本身朝向左右可能会好,从形变角度猜测,朝向固定也利于分析照片)
7.举高一些,再加倾角或者低一些得采集,用房檐和地面尝试匹配,而不是门窗。
8.专门去特征很差得地方额外补几组采集:
特征差指:阳光+阴影、街道过窄、灰墙过多
补全:左中右不同位置、不同高度、不同角度。
实验:加补全数据跑,对比不加。
9.最好换相机,或者改善360的切割效果。
补充:
采集改善小建议:硬件层面,改变相机画幅,因为街太窄,鱼眼切完近的又太近,如果采集不够高,某些镜头只能看到店铺玻璃,此处无明显特征,倾向废图。
在不引入形变的前提下的内部实验改善建议(在没有多高度采集叠加的支持下,如果有,可能不需要):ffmpeg对360全景图的切图参数修改,同样用FOV80,从切5张共覆盖400度,变成切6-7张共覆盖480-560度,改善目标是牌匾等重要特征的视角,近距离只看到玻璃而远距离可能只看到前方路面,修改后可能会获得更好的视角。 可尝试的对照实验:FOV适度加大。对比同等条件是否有轻微改善。
警示:匹配效果不代表重建效果(但却是前提),当你在一个地方缓慢移动叠加大量图片时,特征匹配当然很好,但是三维重建是否效果好?



评论(0)
您还未登录,请登录后发表或查看评论