

开发环境:Ubuntu 18.04 LTS + ROS Melodic + ViSP 3.3.1
文章内容主要参考ViSP官方教学文档:https://visp-doc.inria.fr/doxygen/visp-daily/tutorial_mainpage.html
本文主要介绍了如何使用ViSP实现连通区域标记,本文主要参考了 imgproc中的 tutorial-connected-components.cpp 例程。首先要获取这个例程文件并编译它
svn export https://github.com/lagadic/visp.git/trunk/tutorial/imgproc
cd imgproc/connected-components
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release -DVISP_DIR=$VISP_WS/visp-build
make
执行例程,查看效果
./tutorial-connected-components
输入图像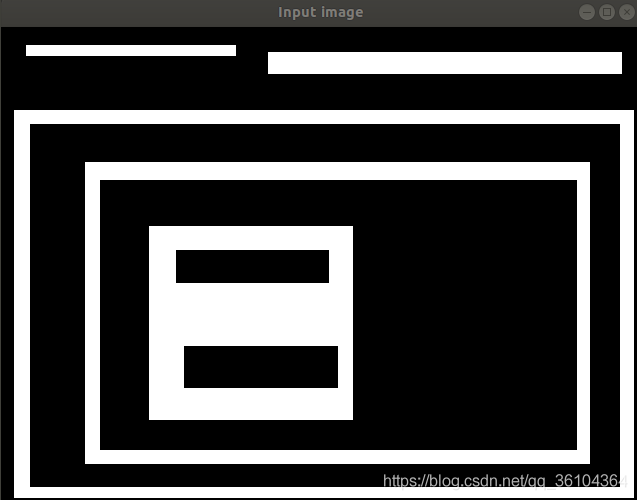
标记后的图像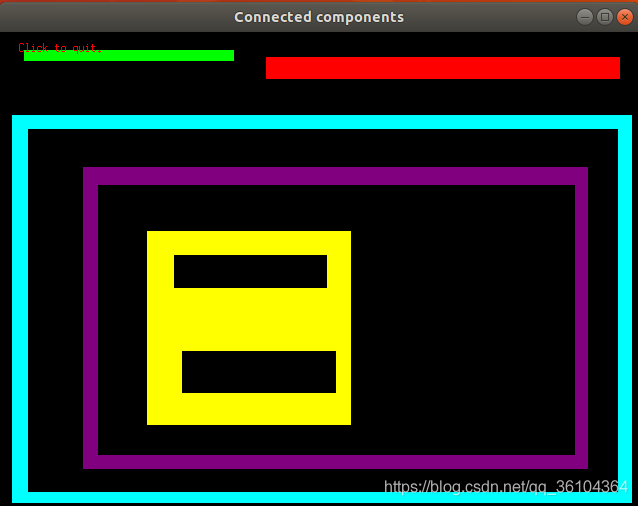
下面介绍一下代码实现过程
#include <cstdlib>
#include <iostream>
#include <visp3/core/vpImage.h>
#include <visp3/gui/vpDisplayGDI.h>
#include <visp3/gui/vpDisplayOpenCV.h>
#include <visp3/gui/vpDisplayX.h>
#include <visp3/io/vpImageIo.h>
#if defined(VISP_HAVE_MODULE_IMGPROC)
//! [Include]
#include <visp3/imgproc/vpImgproc.h>
//! [Include]
#endif
int main(int argc, const char **argv)
{
//! [Macro defined]
#if defined(VISP_HAVE_MODULE_IMGPROC) && (defined(VISP_HAVE_X11) || defined(VISP_HAVE_GDI) || defined(VISP_HAVE_OPENCV))
//! [Macro defined]
std::string input_filename = "img.pgm";
vpImageMorphology::vpConnexityType connexity = vpImageMorphology::CONNEXITY_4;
for (int i = 1; i < argc; i++) {
if (std::string(argv[i]) == "--input" && i + 1 < argc) {
input_filename = std::string(argv[i + 1]);
} else if (std::string(argv[i]) == "--connexity" && i + 1 < argc) {
connexity = (vpImageMorphology::vpConnexityType)atoi(argv[i + 1]);
} else if (std::string(argv[i]) == "--help" || std::string(argv[i]) == "-h") {
std::cout << "Usage: " << argv[0]
<< " [--input <input image>] [--connexity <0: 4-connexity, "
"1: 8-connexity>] [--help]"
<< std::endl;
return EXIT_SUCCESS;
}
}
//! [Read]
vpImage<unsigned char> I;
vpImageIo::read(I, input_filename);
//! [Read]
#ifdef VISP_HAVE_X11
vpDisplayX d, d2;
#elif defined(VISP_HAVE_GDI)
vpDisplayGDI d, d2;
#elif defined(VISP_HAVE_OPENCV)
vpDisplayOpenCV d, d2;
#endif
d.init(I, 0, 0, "Input image");
//! [Connected components]
vpImage<int> labels;
int nbComponents = 0;
vp::connectedComponents(I, labels, nbComponents, connexity);
//第一个参数表示输入图像,第二个参数表示带有标记的联通区域图,每个连通区域中的像素都带有一个相同的标签值
//第三个参数表示连通区域的个数,第四个参数表示判断联通区域的方法:4邻接或8邻接
std::cout << "nbComponents=" << nbComponents << std::endl;
//! [Connected components]
//! [Draw connected components]
//为每个连通区域添加不同的颜色
vpImage<vpRGBa> I_conn(I.getHeight(), I.getWidth());
for (unsigned int i = 0; i < I_conn.getHeight(); i++) {
for (unsigned int j = 0; j < I_conn.getWidth(); j++) {
if (labels[i][j] != 0) {
I_conn[i][j] =
vpRGBa(vpColor::getColor((unsigned int)labels[i][j]).R, vpColor::getColor((unsigned int)labels[i][j]).G,
vpColor::getColor((unsigned int)labels[i][j]).B);
}
}
}
//! [Draw connected components]
d2.init(I_conn, I.getWidth(), 10, "Connected components");
vpDisplay::display(I);
vpDisplay::display(I_conn);
vpDisplay::displayText(I_conn, 20, 20, "Click to quit.", vpColor::red);
vpDisplay::flush(I);
vpDisplay::flush(I_conn);
vpDisplay::getClick(I_conn);
return EXIT_SUCCESS;
#else
(void)argc;
(void)argv;
return 0;
#endif
}
如果大家对于深度学习与计算机视觉领域感兴趣,希望获得更多的知识分享与最新的论文解读,欢迎关注我的个人公众号“深视”。



评论(0)
您还未登录,请登录后发表或查看评论