

0x00 往期博文
0x01 实验结果
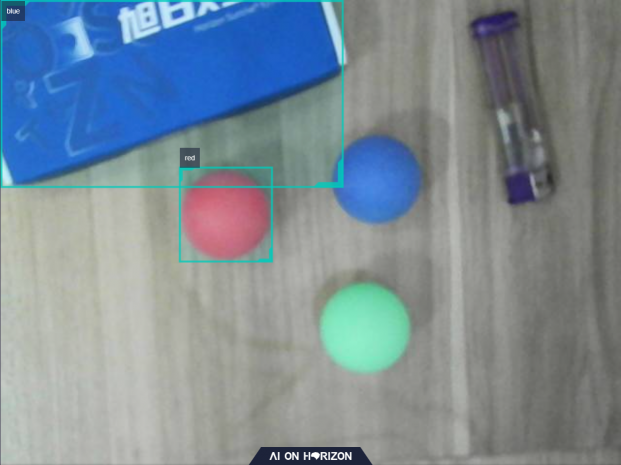
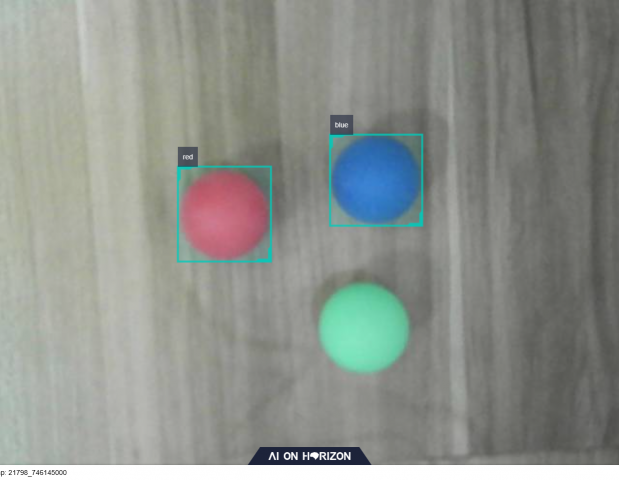
基于 OpenCV 在 HSV 色彩空间下识别红、绿、蓝三原色,框选出每种颜色轮廓最大的物体。

0x02 知识点
0\ 旭日X3派调用USB摄像头,web展示;
1\ HSV 和 LAB 色彩空间;
2\ 发布 PerceptionTargets.msg 消息,用于在 web 端显示;

0x03 编写 usb_cam launch 文件;
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python import get_package_share_directory
def generate_launch_description():
web_service_launch_include = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(
get_package_share_directory('websocket'),
'launch/hobot_websocket_service.launch.py'))
)
return LaunchDescription([
web_service_launch_include,
# 启动图片发布pkg
Node(
package='hobot_usb_cam',
executable='hobot_usb_cam',
name='hobot_usb_cam',
parameters=[
{"camera_calibration_file_path": ""},
{"frame_id": "default_usb_cam"},
{"framerate": 30},
{"image_height": 480},
{"image_width": 640},
{"io_method": "mmap"},
{"pixel_format": "mjpeg"},
{"video_device": "/dev/video8"},
{"zero_copy": False}
]
),
# 启动web展示pkg
Node(
package='websocket',
executable='websocket',
output='screen',
parameters=[
{"image_topic": "/image"},
{"image_type": "mjpeg"},
{"smart_topic": "/hobot_color_ball_detection"},
{"only_show_image": False}
],
arguments=['--ros-args', '--log-level', 'error']
),
])
1\ 启动 webservice 节点,ngix 服务器
2\ 启动 usb_cam 节点,发布 jpeg 图像,注: 官方文档声明只能发布 jpeg;
3\ 启动 websokect 节点,智能显示识别结果;
websocket接收 图像消息 和 智能结果消息,根据时间戳进行匹配,然后输出给web端渲染显示,也可单独显示图像。
图像消息支持 sensor_msgs::msg::Image 以及 shared_mem 的 hbm_img_msgs::msg::HbmMsg1080P 类型消息,必须为hobot codec输出的jpeg格式数据。
智能结果消息支持 ai_msgs::msg::PerceptionTargets 类型消息,其中 header.stamp 必须和该结果对应的 image 消息相同,websocket会使用该字段进行消息匹配,还有智能结果对应的宽高必须要和接收到的图像分辨率一致。
具体依赖的package有:
mipi_cam:启动mipi cam,发布nv12类型图像消息
hobot_codec:将mipi_cam发布的nv12图像编码为websocket需要的jpeg格式图像
mono2d_body_detection:接收nv12格式数据,进行算法推理,发布人体、人头、人脸、人手框感知消息
这里重点关注 ai_msgs::msg::PerceptionTargets 类型消息,参考 mono2d_body_detection 发布的结果;
本文中笔者发布的智能结果消息,名称为:
{"smart_topic": "/hobot_color_ball_detection"},
往期博文中对 ai_msgs::msg::PerceptionTargets 类型的消息有所介绍:
0x04 编写 color_ball_tracking.py 文件;
1、编写ColorBallTracking节点,订阅 usb_cam 发布的 Image 话题。
2、编写处理图像函数 color_identify
3、发布 PerceptionTargets.msg;
代码如下:
#!/usr/bin/env python3
# -*- coding: utf-8 -*-
"""
@作者: ning
@说明: 订阅 /image 图像消息, 发布 框
"""
import rclpy # ROS2 Python接口库
from rclpy.node import Node # ROS2 节点类
from sensor_msgs.msg import Image # ROS2标准定义的String消息
from ai_msgs.msg import PerceptionTargets, Target, Roi
from sensor_msgs.msg import RegionOfInterest
from cv_bridge import CvBridge # 用于 openCV 和 ROS msg 之间的转换
import cv2
import math
import numpy as np
import time
class ColorBallTracking(Node):
def __init__(self, name):
super().__init__(name) # ROS2节点父类初始化
# 创建订阅者对象(消息类型、话题名、订阅者回调函数、队列长度)
self.sub = self.create_subscription(
Image, 'image', self.listener_callback, 10)
# 创建发布者对象(消息类型、话题名、队列长度), 发布框
self.publisher_ = self.create_publisher(
PerceptionTargets, 'hobot_color_ball_detection', 10)
self.cv_bridge = CvBridge()
# 色块识别函数
def color_identify(self, image, target_color='red'):
_img = image.copy()
_color_space = 'hsv' # 'hsv' 或 'lab'
# 获取图像宽高, 默认 640, 480
img_h, img_w = _img.shape[:2]
# 图像已经是 640*480 了
# img_resize = cv2.resize(_img, SIZE, interpolation=cv2.INTER_NEAREST)
# 高斯模糊, 抑制摄像头噪声(一些白点会被过滤掉,但影响不大, 因为他们的面积不会超过被识别物体?)
imt_g_blur = cv2.GaussianBlur(_img, (7, 7), 0) # 可以改成均值模糊
frame_mask = None # 掩膜结果
if _color_space == 'hsv':
hsv_data = {
'red': {'lower': (0, 43, 46), 'upper': (10, 255, 255)},
'red1': {'lower': (156, 43, 46), 'upper': (180, 255, 255)},
'blue': {'lower': (100, 43, 46), 'upper': (124, 255, 255)},
'green': {'lower': (35, 43, 46), 'upper': (77, 255, 255)},
}
# 将图像转换到 HSV 色彩空间
frame_hsv = cv2.cvtColor(imt_g_blur, cv2.COLOR_BGR2HSV)
# 对图像进行掩膜运算
frame_mask = cv2.inRange(frame_hsv,
hsv_data[target_color]['lower'],
hsv_data[target_color]['upper'])
# 红色有两个区间, 所以做与运算
if target_color == 'red':
frame_mask1 = cv2.inRange(frame_hsv,
hsv_data['red1']['lower'],
hsv_data['red1']['upper'])
frame_mask = cv2.bitwise_or(frame_mask, frame_mask1)
elif _color_space == 'lab':
lab_data = {
'red': {'min': (0, 43, 46), 'max': (10, 255, 255)},
'red1': {'min': (156, 43, 46), 'max': (180, 255, 255)},
'blue': {'min': (100, 43, 46), 'max': (124, 255, 255)}
}
# 将图像转换到LAB空间
frame_lab = cv2.cvtColor(imt_g_blur, cv2.COLOR_BGR2LAB)
# 对原图像进行掩模运算
frame_mask = cv2.inRange(frame_lab,
np.array(lab_data[target_color]['min']),
np.array(lab_data[target_color]['max']))
# 颜色空间设置错误
if frame_mask is None:
return -1, -1, -1, 0
# 开运算, 消除白点
# opened = cv2.morphologyEx(frame_mask, cv2.MORPH_OPEN, np.ones((5, 5), np.uint8)) # 开运算, 消除小白点
# closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, np.ones((3, 3), np.uint8)) # 闭运算, 闭合被识别的障碍物
closed = frame_mask
# debug
# cv2.imshow('color_identify', closed)
# cv2.waitKey(10) # 等待 10ms
# 找出所有外轮廓
contours, _ = cv2.findContours(closed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)
# 如果未发现任何颜色, 或者说 没有发现轮廓
if len(contours) == 0:
return -1, -1, -1, 0
# 对轮廓对象按面积进行排序, 降序, 面积最大的为序号为0
c_sorted = sorted(contours,
key=lambda x:
math.fabs(
cv2.contourArea(x)
), reverse=True)
c_0 = c_sorted[0] # 最大轮廓
# 如果面积小于 100, 认为是噪声, 进行下一次处理
if math.fabs(cv2.contourArea(c_0)) <= 100:
return -1, -1, -1, 0
return tuple(
map(int, cv2.boundingRect(c_0))
)
# 图像回调函数
def listener_callback(self, data):
self.get_logger().info('Receiving video frame') # 输出日志信息,提示已进入回调函数
# 将ROS的图像消息转化成OpenCV图像
image = cv2.imdecode(np.frombuffer(data.data, np.uint8), cv2.IMREAD_COLOR)
# debug
# cv2.imshow("origin", image)
# cv2.waitKey(10) # 等待 10ms
# 颜色识别
_color_type = 'red'
# --- PerceptionTargets
pt = PerceptionTargets()
pt.header = data.header
pt.fps = 30
# pt.perfs = []
# --- target
t = Target()
t.type = 'red'
t.track_id = 0
t2 = Target()
t2.type = 'blue'
t2.track_id = 0
# --- rois
r = Roi()
r2 = Roi()
# r.type = 'red'
# --- RegionOfInterest
roi1 = RegionOfInterest()
roi2 = RegionOfInterest()
# 颜色识别
roi1.x_offset, roi1.y_offset, roi1.width, roi1.height = self.color_identify(image, "red")
roi2.x_offset, roi2.y_offset, roi2.width, roi2.height = self.color_identify(image, "blue")
roi1.do_rectify = False
roi2.do_rectify = False
# --- RegionOfInterest end ---
r.rect = roi1
r.confidence = 0.
r2.rect = roi2
r2.confidence = 0.
# --- rois end ---
t.rois = [r]
t2.rois = [r2]
# t.attributes = []
# t.points = []
# t.captures = []
# --- target end ---
pt.targets = [t, t2]
# pt.disappeared_targets = []
# --- PerceptionTargets end ---
self.publisher_.publish(pt) # 发布预测结果消息
def main(args=None): # ROS2节点主入口main函数
rclpy.init(args=args) # ROS2 Python接口初始化
node = ColorBallTracking("color_ball_tracking") # 创建ROS2节点对象并进行初始化
rclpy.spin(node) # 循环等待ROS2退出
node.destroy_node() # 销毁节点对象
rclpy.shutdown() # 关闭ROS2 Python接口
0x05 难点;
1\ 将 usb_cam 发布的 jpeg 格式图像转为 bgr8;

评论(0)
您还未登录,请登录后发表或查看评论