

课程目的
本课程主要讨论对于想学习在安全性重要的机器人应用场景,如自动驾驶、社交机器人、人机交互,如何用安全控制理论提供保障。
主要介绍安全控制的理论原理,并在有多个移动障碍物的拥挤环境中验证移动机器人的安全性,用具体代码为大家讲解安全控制算法实施的全过程。还会讨论如何用安全控制理论来提升强化学习的安全性和训练效率,并提供具体实现代码。
课程内容
本课程总时长2小时,首先介绍机器人安全性在safety-critical场景的重要性,如自动驾驶、社交机器人、人机交互。

然后介绍安全控制的理论原理,包括安全指数,安全控制集以及如何投影到安全控制集。并在有多个移动障碍物的拥挤环境中用具体代码讲解算法实施的全过程。方便应用到其他任务的实际应用上。
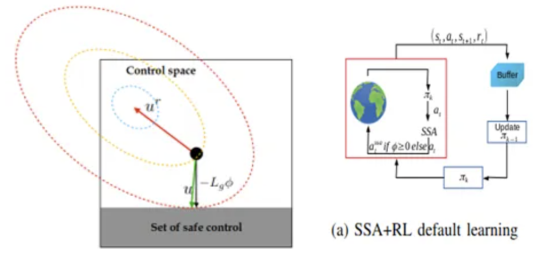
最后介绍安全强化学习的常见策略,讨论如何用安全控制理论和网络蒸馏的方法来提升强化学习的安全性和训练效率,并提供具体实现代码。
推荐学习资料:
http://www.cs.cmu.edu/~cliu6/16-883/psr-spring21.html
https://arxiv.org/abs/2303.14265
https://cmudeeprl.github.io/703website_f20/
课程目录
一、概述
1.1.安全机器人概述
1.2.模拟环境介绍和安装二、安全控制
2.1. Naive的安全控制算法
2.2.Safe Set Algorithm (SSA)
2.2.1. 数学理论和安全性证明
2.2.2.代码的导数推导
2.2.3. 代码完整实现和测试
2.2.4.缺点分析三、安全强化学习
3.1. 安全强化学习概述
3.2. 硬约束方法(TD3+SSA)
3.3.硬约束方法代码实现和测试四、代码讲解
五、论文讲解
*课程资料请到微信公众号“古月居”后台回复“仿真控制资料”获取
课程试看
温馨提示
1 、具有控制论基础的人群,如反馈控制和强化学习基础来学习安全控制理论和安全强化学习内容,或者对此感兴趣的人群。
2、由于本产品的视频课程属性,观看后不予退款。
3、本课程购买后2年内可以免费观看。由于本产品的视频课程属性,观看后不予退款。
购课优惠
古月居官网所获积分可以兑换优惠券哦!打开古月居官网-【我的主页】-【积分兑换】,点击兑换。


兑换成功后在【兑换记录】查看兑换码,就可以在手机端使用了,不要错过省钱机会哟~

两人拼团即可享受优惠价~
三人拼团更实惠哦!
购课可在课程详情页领取5元无门槛优惠券
【限量50张,每人限领一张】
优惠券领取后15天内有效



(扫码可领取课程优惠券)



评论(0)
您还未登录,请登录后发表或查看评论