1、前记: 续写MATLAB下机器人可视化与控制---simulink篇(2),继续完善基于MATLAB/simulink的机器人控制---位置控制。这里主要是PID和GUI部分。PID作为单关节伺服控制部分,GUI作为上位机完成简单的基本运动指令。 2、位置控制: 在预先指定的坐标系上,对机器人末端执行器(end effector)的位置和姿态(方向)的控制。如图所示,末端执行器的位置和姿态
1、将 CAD 和 URDF 多体模型导入Simscape Multibody环境中。 从第三方应用程序导入多体模型, 以便在Simscape多体环境中进行模拟、设计和分析任务。可以使用 smimport 函数导入 CAD 和 URDF 模型。必须以有效的 XML 格式导出 CAD 模型-在导入之前符合 Simscape 多体 XML 架构。XML 文件称为多体描述文件。 使用 Simscap
1、前记 先提一下,在这篇MATLAB机器人可视化文章中提到了如何使CAD模型的机器人在MATLAB环境下可视化的问题,因为自己没有装有SolidWorks,Pro-E之类的CAD软件,所以也没有亲自去实践将CAD模型导出含meshes和urdf的文件方式。(如:https://www.zhihu.com/question/40801341/answer/134010201)。所以在从缺乏原创性(
1、前言:MATLAB下机器人可视化与控制---simulink篇(1)主要内容:是利用 smimport('YourRobot.urdf');函数将含有机器人文件的机器人导入到MATLAB中,并集合成一个装配体在simulink中---和Simscape Multibody中的例子一样,通过给关机以驱动实现机器人的运动控制 ,如 matlab机械臂运动(2)中,Revolute Joint中的A
1、前记按照一定的套路,在开篇之前先如下方式开车---自行车(自己学习的总结)。 在之前的博客中写到了一些MATLAB环境下使机器人可视化,并做控制。如: MATLAB机器人可视化、 一种从Robotstudio环境中导出机器人模型并在MATLAB下使其可视化的研究记录、Robotics System Toolbox中的机器人运动(1)、Robotics System T
1、前记: 可能用Robotics Toolbox建立的机器人模型与实际机器人在外观上存在天壤之别吧,直接将CAD软件(UG、SolidWorks、CATIA、Proe等)做好的3D模型导入MATLAB中是一个很好的选择。 下面记录MATLAB官网上的如何显示具有可视几何图形的机器人建模。 1)导入具有.stl文件的机器人与统一的机器人描述格式 (URDF)
工具和参考链接 由于机器人动力学模型往往都是非线性的,这里用到的工具是: MATLAB的System Identification Toolbox(系统辨识工具箱),其中的Nonlinear Grey-Box Models(非线性灰箱建模工具),链接如下: System Identification Toolbox Nonlinear Grey-Box Mo
两连杆机器鱼的简单建模方法 在机器鱼的建模过程中,无可避免地会遇到一个问题,那就是: 机器鱼的推进力是如何产生的呢? 如果不想明白这个问题,我们没有对推力建模,机器鱼甚至都无法前进,这样我们的建模工作自然就无法往下进行了。 如何对这个问题的解答呢? 生物学家会认为鱼类会利用身体摆动产生反卡门涡街,向后喷射,从而获得推进力,但
本文介绍了如何利用MATLAB辨识状态空间方程中的未知参数。 假设我们的被控系统的表达如下: 我们想要通过实验数据辨识出参数K1和K2,方法如下: 第一步,采集实验数据。 需要的数据包括系统一段时间内的系统输出Y(ts),以及控制量U(ts),这些数据应该是以某个固定的采样频率进行采集得到的。另外,最好是要采集系统的初始
机器人专业的学生,多多少少总需要和机械结构打点交道。有时候可能是做个安装设备的架子,有时候可以需要个简单的运动机构,这些简单的东西如果找别人做就会耽误很长的一段时间。这个时候掌握一点Solidworks绘图技能,你的苦恼就消失啦。 所以,这篇文章只是给需要设计很简单零件的机器人专业的同学,专业的同学请绕道 >_>。 1 Solidworks使用逻辑
嗨伙计们,罗伯特祥又来和大家见面了! 最近,很多小伙伴私信我,问我到底应该使用哪款仿真器来仿真,所以笔者临时决定结合自己的使用经历写篇科普文跟大家一起来分析对比一下Gazebo、Webots和V-REP这几款常用的机器人仿真软件。 首先是Gazebo,相信熟悉ROS的朋友无人不知Gazebo,它是属于ROS生态的一款开源仿真器,功能很强大,正因为其开源特性被广泛
大家好,最近有其他事情耽搁了更新。今天给大家继续一知半解的系列4。在上一篇博客中我们已经演示了如何利用Simulink中的Slider Gain模块和Siganl Build模块对机器人进行简单运动控制。今天简单的介绍机器人独立关节的位置PID控制,并演示一下如何使用GUI与Simulink联合仿真对机器人进行操作控制。 1、独立关节位置PID控制 机器人进行操作时,主要是让机器人的末端按照我们预
PX4无人机ROS下仿真开发 Overview Simulation Px4_control Slam Map Image_process Planning Volans 项目地址volans注:有任何疑问都可在issues提问:) Simulation 此simulation 包含2D、3D激光雷达模型、深度相机模型、双目相机模型、realsense相机模型、
前言 本文所使用的仿真软件是开源的Rotors包,仅供学习使用!然后这里说明下,只是个人爱好仿真下无人机玩玩,对官方给的无人机控制代码理解的也不是很深刻,大家可以自己摸索摸索自己开发,这里会提供大家下载安装教程以及我已经尝试过的玩法教程,后续可能会继续更新。 项目官方github地址:rotors项目地址 我的github地址:我的项目地址 安装rotors 首先创建工作区间: mkd
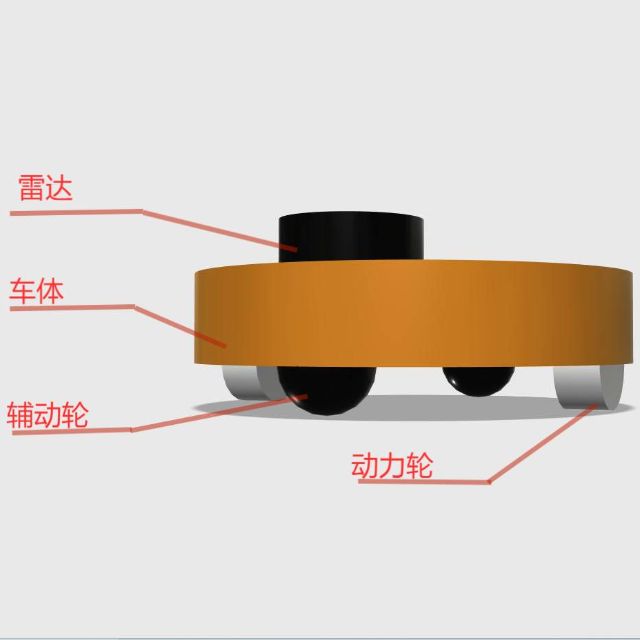
嗨伙计们,月更侠罗伯特祥又来和大家见面了!今天我们来聊一聊Webots中关于机器人建模的那点事儿,相信有了前面的基础,今天的文章对你来说So easy!话不多说,我们来看看怎么玩儿吧~ 1.四轮差速小车建模 环境建模我们就略过去了,直接上图: HingeJoint节点的使用: 首先添加一个Robot节点,在子节点children下新建一个Shape作为车身,重命名为car-body,然后
之前发了一个在gazebo中抓取失败的帖子,过段时间来看被删了好像, 可能我发错地方了。后来在github上一个牛人的程序里找到了一个grasp fix的插件来修复抓取问题(据他说,这个问题是gazebo7以及之前版本普遍的问题,ode的问题), 虽然我的毕设到此能抓就行了。但是我有个问题想问,我现在的抓取使用ros 的gripper control来控制夹抓开合程度(模型好像只支持平行抓取),
嗨伙计们,还记得上次提到的三种webots机器人建模方式吗?我们先来简单回顾一下: ① 使用webots模型树建模,同时这也是我们环境建模的主要方式; ② 使用三维建模软件导出VRML,通常我们导入模型的零部件,然后在webots内进行装配; ③ 利用已有的urdf/xacro转换,使用urdf2webots功能包可直接获得所需的模型; 今天跟大家
第三方账号登入
看不清?点击更换

















第三方账号登入
QQ 微博 微信