

又是一个容易被新手忽略的小问题。
当我们使用rviz时,比如运行雷达后没有点云数据,即使我们能看到发布了/scan话题
像这样,就是没点云图,看一下laserscan提示的错误:
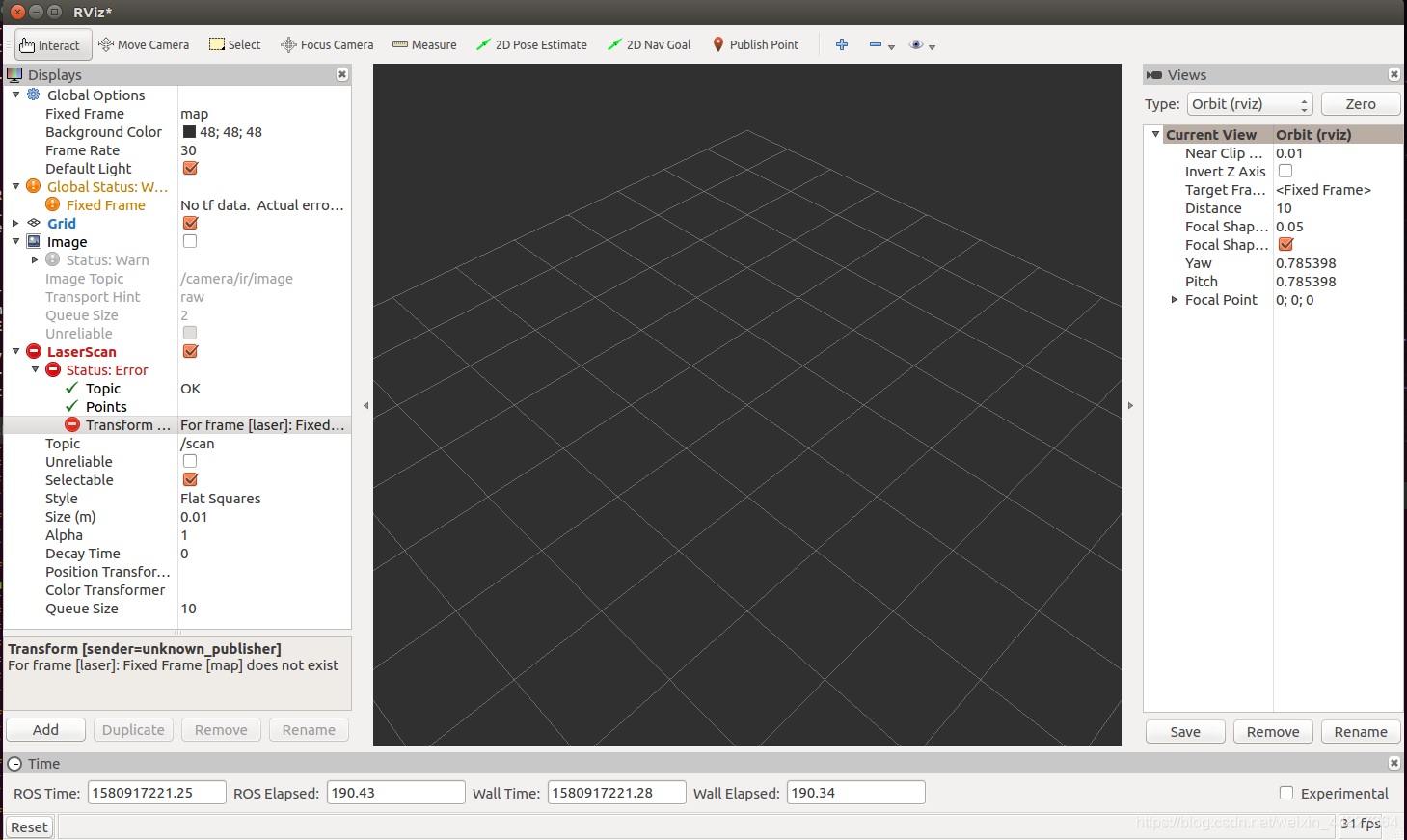
For frame [laser]: Fixed Frame [map] does not exist
看Global Options 当中的Fixed Frame ,是map。这是因为世界坐标定义成map,单独运行sensor 节点不会生成世界坐标,而传感器坐标laser找不到世界坐标,就定位不了自身
的位置,从而报错。
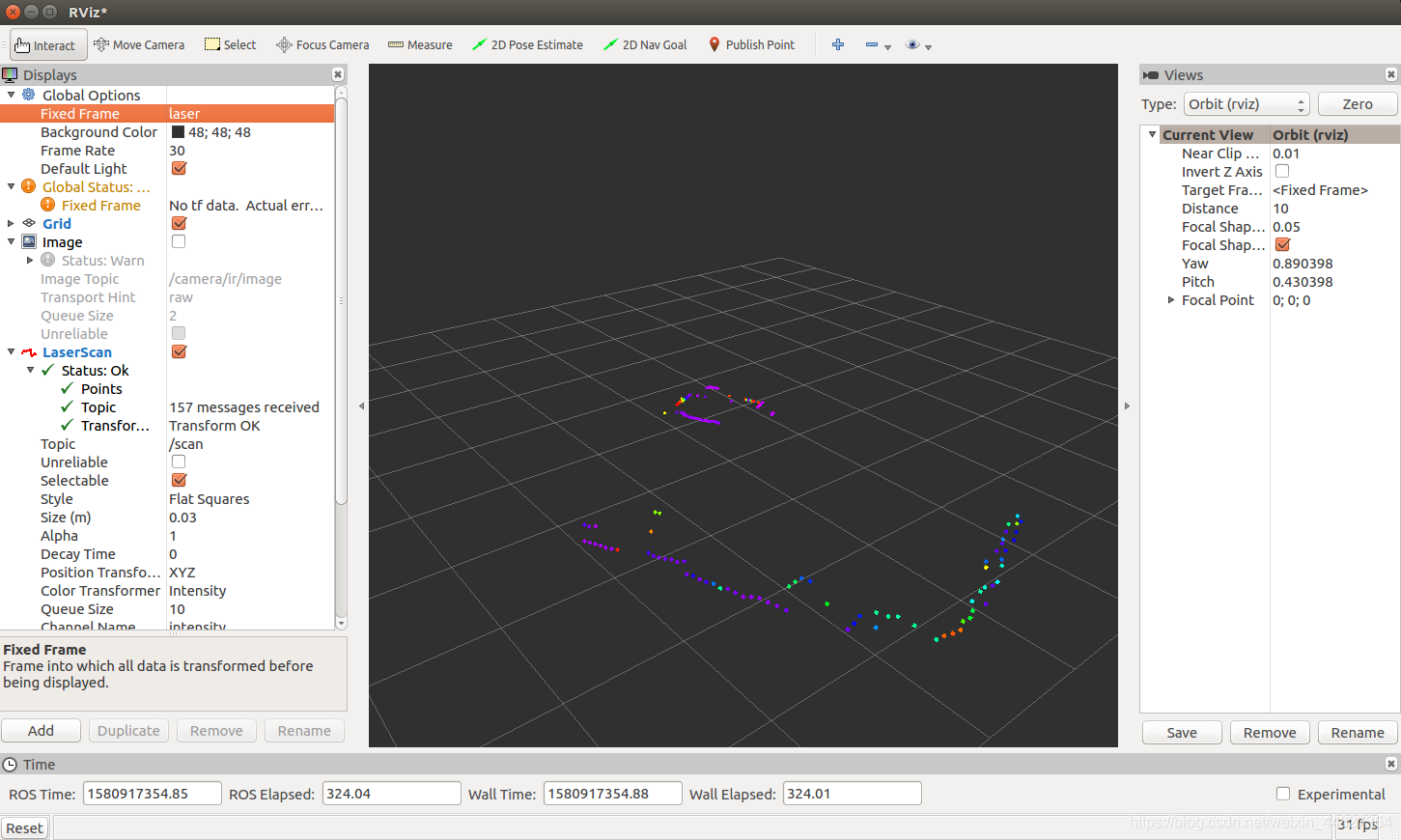
修改方法,只需要将世界坐标改成sensor的坐标laser就可以了。如下图:就可以看到扫描数据了。



评论(0)
您还未登录,请登录后发表或查看评论