

在机器人的世界中,关键的两种能力,一种是操作能力,一种是移动能力。一个功能完善的移动机器人包括运动、传感、定位、运动规划等多方面技术,涵盖了硬件设计、轮子设计、运动学分析、传感器和感知、定位、作图以及机器人控制体系结构。目前,先进的机器人主要集中在日本和西方发达国家的机器人企业,且已处于大规模应用阶段,而我国国内的机器人还在起步阶段,在部分产品的技术性能上和基本功能上虽然和国外产品相差不大,但是可靠性方面存在较大差距。基于此,本系列文章将从上述几个方面一一详解移动机器人。
本节主要阐述运动方式概述、轮式移动机器人概述。
1 运动概述
1.1 自然界中的运动模式
移动机器人的运动机构是仿照自然界的运动途径来进行设计的,在自然界中,不同生物可以穿越各类崎岖环境并保持敏捷的运动,其常见的类型如图1[1].可见,自然界中并未出现轮式运动的生物形态,这一方面可能源于生物组织的生长局限性,但也因为轮式的运动十分受限,对生物的生存构成极大的危险,在自然法则下也不太可能出现。
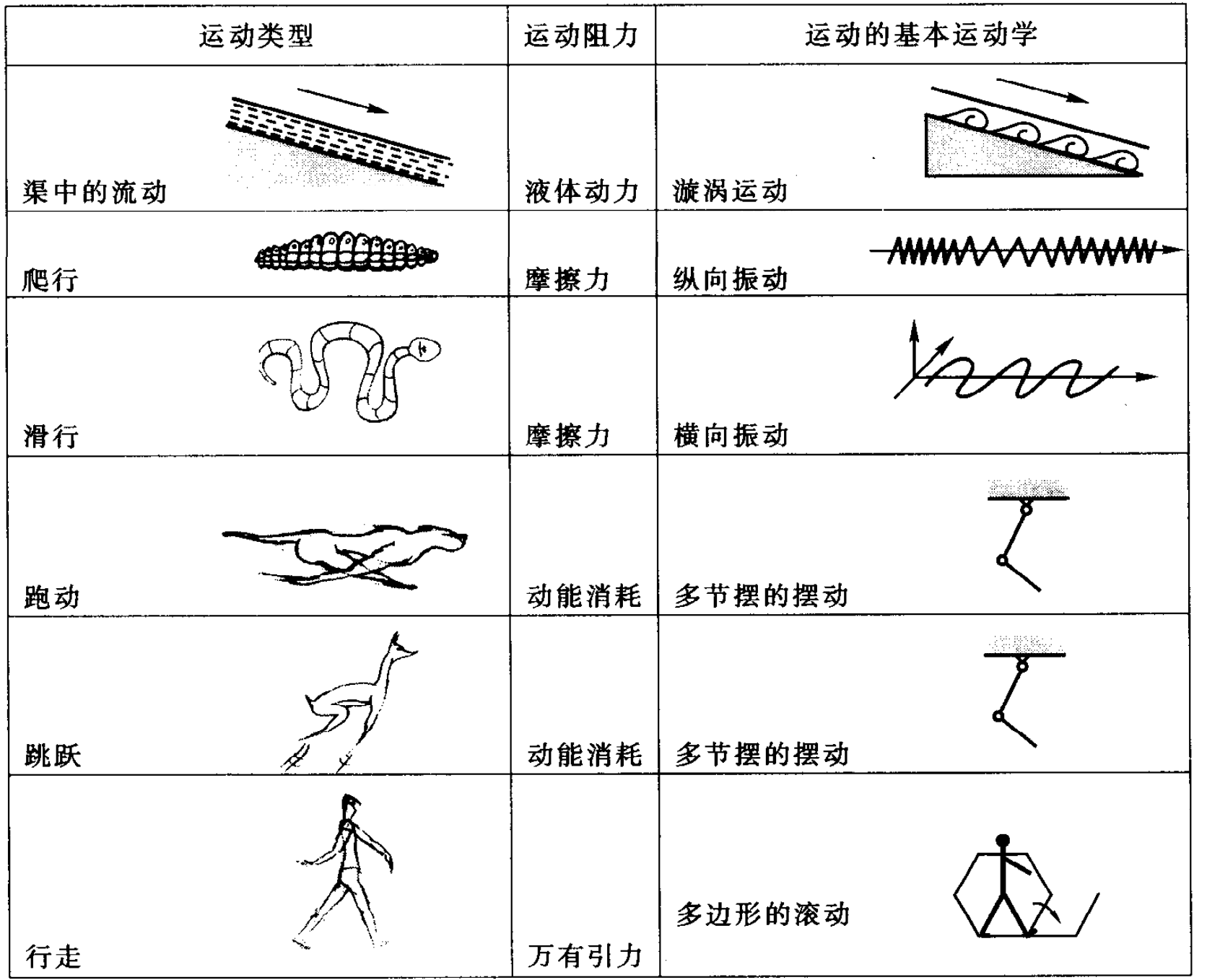
图1 生物运动类型
但是,图1的最后一行的运动类型——足式行走,随着步距的减小和行走频率的加快,可以看到这其实就行一个圆或者轮,虽然自然界没有创造出完全旋转、有源动力的关节,但这已经趋近于轮式运动了。
1.2 机器人移动种类及特点
在所有运动机构中,通常分为轮式、履带式、足式、蛇形四大类,如图2所示,其中,履带式因为具有接地比压小,在松软地面的附着性能好等优点,常被应用于野外越障侦查、排雷等场合;足式机器人能够适应复杂的地形,但是结构自由度太多,机构复杂,难以控制;蛇形机器人在特殊环境中具有独特的优越性,但是承载能力和运动平稳性较差。而轮子是移动机器人最流行应用最广泛的运动机构,在平坦的地面上可以达到很高的效率。轮式机器人的研究主要倾向于牵引、稳定性、机动性及控制问题,而很少考虑平衡问题。

图2 移动机器人类别
1.3 移动能力的关键研究问题
在运动中,通常研究的有以下三个问题:
(1)稳定性——接触点的数目和几何形状、重心、静态/动态稳定性、地形的倾斜
(2)接触特征——接触点/路径的尺寸和形状、接触角度、摩擦
(3)环境类型——结构、媒介(水、空气、不同软硬程度的地面等)
2 轮式机器人的轮子运动
2.1 轮子
(1)数目
在当前的轮式运动中,有无轮、单轮、双轮、三轮、四轮、多轮等数目,其中,无轮移动机器人是轨道运行的一种,例如磁悬浮列车,采用磁力性能和轨道的导引来进行移动,比较特殊一些。而有轮的机器人数目的不同对其平衡、稳定有很大影响,例如独轮、双轮的稳定性要低于三轮、四轮、多轮;而轮子数目大于3个,则需要考虑轮子是否能够全部着地,采用悬挂结构来确保这一问题。

图3 无轮列车(磁悬浮列车)
(2)结构
轮子的结构大致有四种,分为标准轮、全向轮/麦克纳姆轮、舵轮、球形轮,如下图。
标准轮即常见的汽车、自行车等车轮,以轮轴为控制方向。

图4 标准轮子
全向轮的种类包括正交轮、单排轮、双排轮、脚轮、各向异性摩擦轮、麦克纳姆轮等,其中最常用的三类轮子为脚轮、双排轮、麦克纳姆轮。
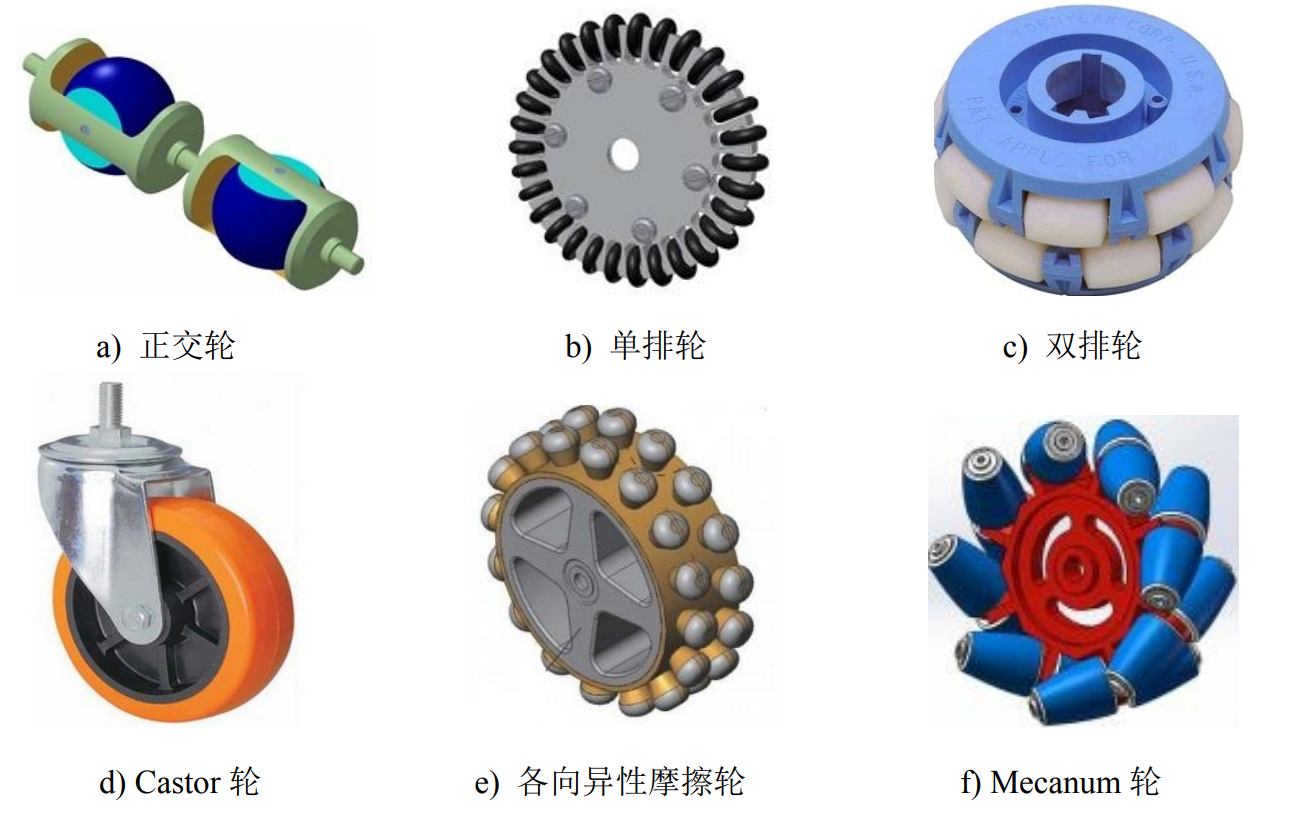
图5 全向轮/麦克纳姆轮
脚轮与标准轮控制很像,都需要先沿着垂直轴操纵轮子,但是脚轮会绕着顶部偏心轴转向,会引起一个力加到机器人底盘上。麦克纳姆轮和双排轮另见文章《详谈麦克纳姆轮》、《详谈omni轮》。

图6 舵轮
舵轮由一个行走轮和一个转向轮组成,行走轮负责牵引,转向轮负责牵引方向,舵轮根据安装结构的不同分:卧式舵轮和立式舵轮。舵轮承载一般在500Kg以上。行走轮一般会带刹车。

图7 球形轮
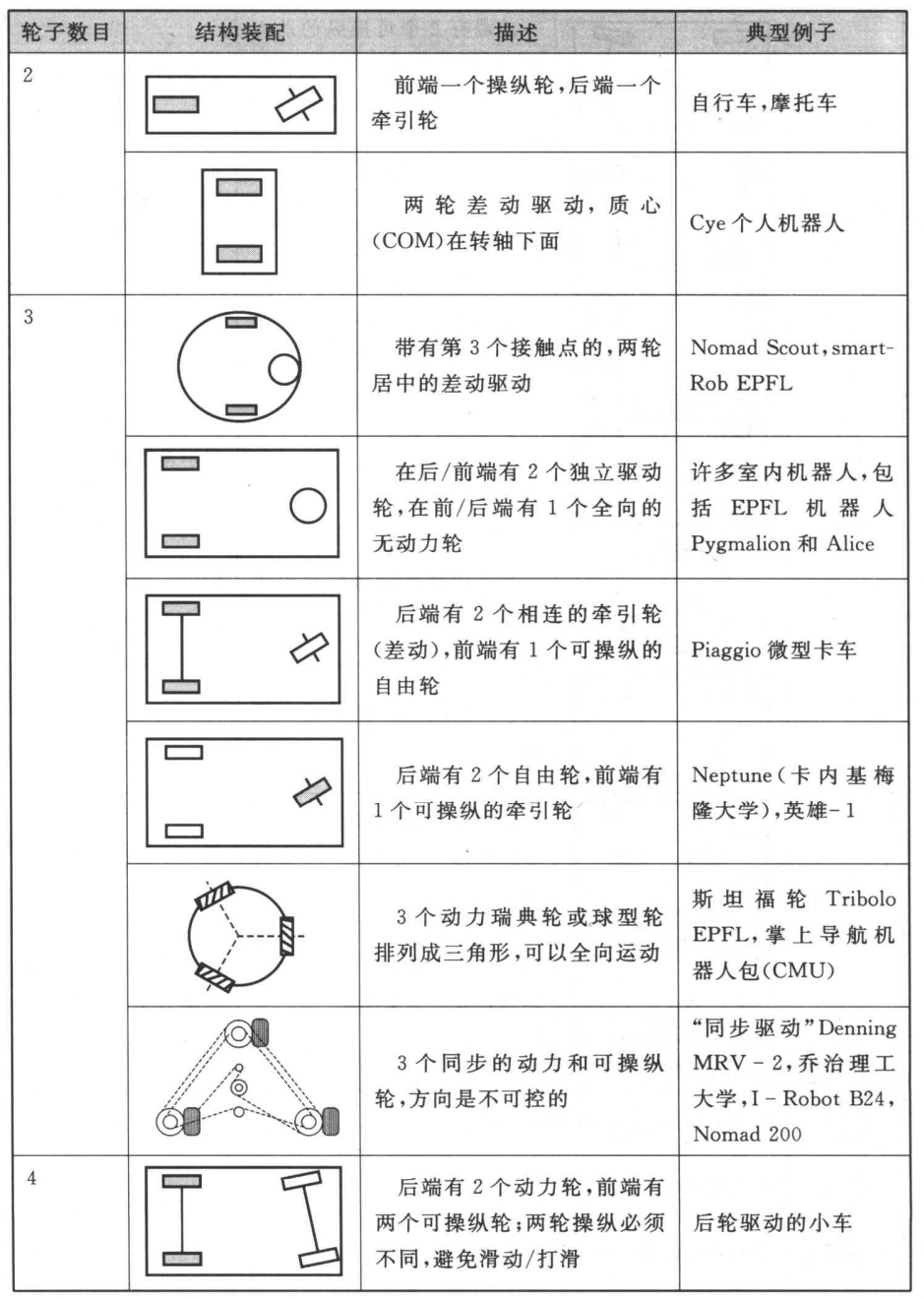
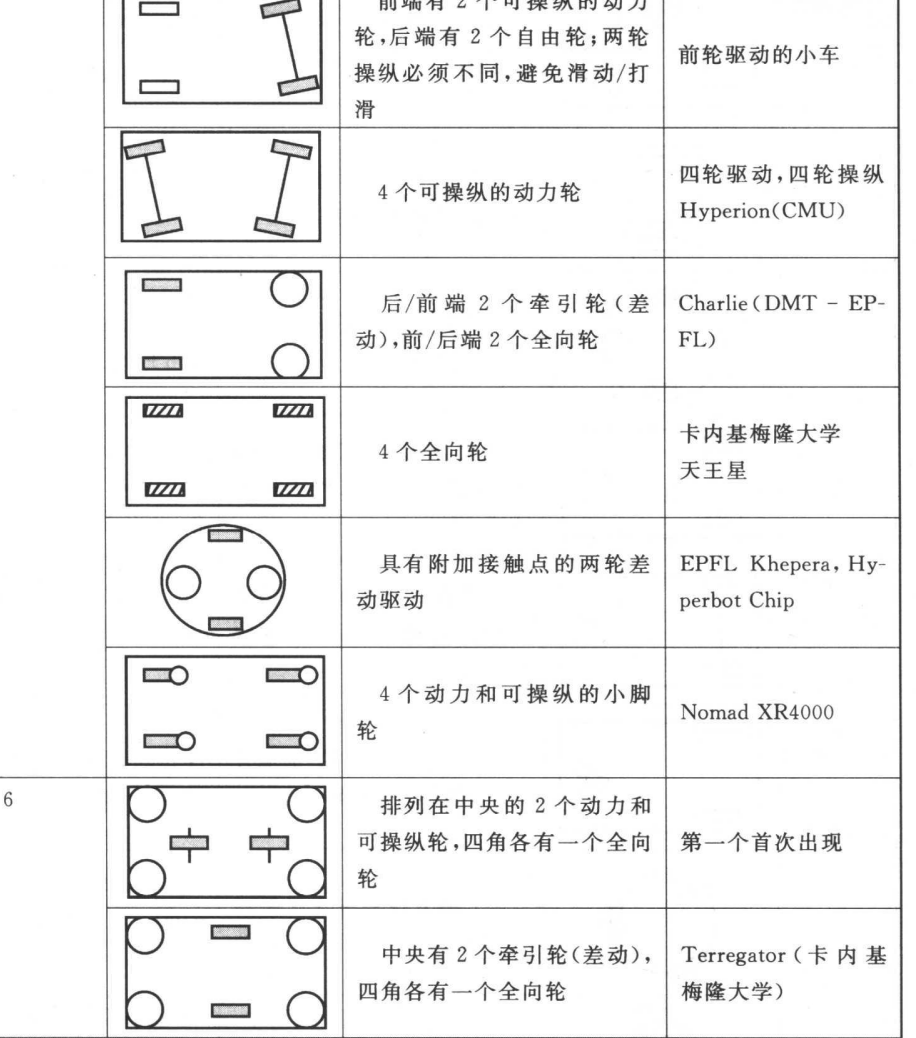
(3)布局
不同轮子的数目都有特定的优点和缺点,不同的结构主要影响可控性、稳定性、机动性。其常用的布局如下图[1]所示
三、常见的几种底盘驱动布局
1. 同步驱动结构
同步驱动结构采用3个驱动轮、3个操纵轮,只使用了2个电机:操纵电机和驱动电机。图中与灰色的轮子直接接触的操纵皮带用于控制三个轮子的方向,驱动皮带用于控制轮子的转速,采用这种驱动方式,机器人可以在任意方向上移动,但是底盘方向不可控,即机器人不管左右移动还是前后移动,底盘永远都是一个方位,不受轮子影响[1]。

图9 同步驱动结构
约束型的底盘驱动方式有:差分驱动、阿克曼驱动、同步驱动。非完整约束型的底盘驱动方式有:全向驱动、腿足驱动。
2.两轮差分驱动结构
服务机器人、 500KG负载以下的AGV常用两轮差分驱动底盘结构,根据万向轮数量可以分2种: 3轮结构、 6轮结构。
其中3轮结构是包含 2个驱动轮和 1个万向轮,轮与车架只需采用刚性连接就可以,但存在原地旋转时占用空间较大的缺点。
6轮结构包含2个驱动轮在中间、 4个万向轮在车的4个拐角。 该结构必须做特殊悬架处理才可以保证2个驱动轮始终受力着地。比如采用三组平衡桥(左驱动轮+左后万向轮=1号驱动平衡桥,右驱动轮+右后万向轮=2号驱动平衡桥,左前万向轮+右前万向轮=万向轮平衡桥),如图10所示。
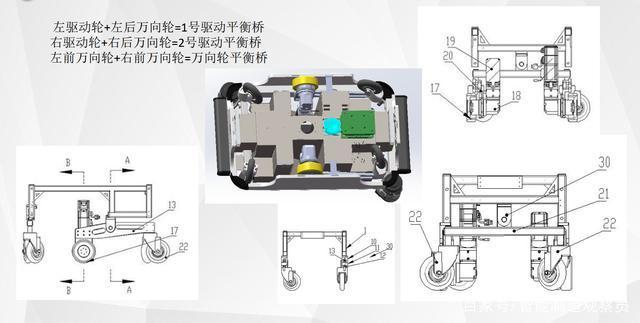
图10 三组平衡桥示意图
具体底盘分析详见《详谈两轮差分驱动底盘》。
3.全向驱动
(1)全向轮
参看Omni轮文章系列:《详谈Omni轮》
(2)麦克纳姆轮的全向运动
参看麦克纳姆轮文章系列:《详谈麦克纳姆轮(一)》、《详谈麦克纳姆轮(二)》、《详谈麦克纳姆轮(三)》。
4 舵轮结构
舵轮底盘可分为单舵轮和双舵轮两种,其中,单舵轮底盘在叉车上面有着非常广泛的应用。底盘由1个舵轮、 2个定向轮组成,可以适应各种地面,保证驱动舵轮一定着地。
根据车重心分布的不同,舵轮是大概会承担50%的自重,所以牵引力非常强。
双舵轮底盘由2个舵轮、 2个万向轮组成。 2个舵轮和2个万向轮分别成对角布置。这个4个轮都会受力,为了适应不同起伏路面,需要把2个轮做成上下浮动结构。一般将2个万向轮用弹簧做成上下浮动(或直接选用带弹簧浮动的脚轮)。当弹簧刚度太大时,空载时,可能让舵轮悬空或舵轮正压力太小,弹簧刚度太小时,满载横向加速时,车身倾斜的厉害。应合理选用弹簧。
参考文献
[1] 自主移动机器人导论
[2]激光导航AGV车结构设计概述[EB/OL]https://baijiahao.baidu.com/s?id=1654054245819625118&wfr=spider&for=pc



评论(0)
您还未登录,请登录后发表或查看评论