

桂林电子科技大学信息科技学院- 电子工程系 三
-
- 3.1 GPS卫星定位模块
- 3.2 磁阻传感器
- 3.3 气压计
转自:
四轴飞行器及其UAV飞控系统 - 桂林电子科技大学信息科技学院 电子工程系嗯 ,这篇论文看样子飞控什么电路都是自己搭建的,觉得有比较大的参考意义吧,现在基本上是往底层这边靠近了
3.1 GPS卫星定位模块
导航系统采用了一颗ublox的GPS模块,通过UART口与核心相连。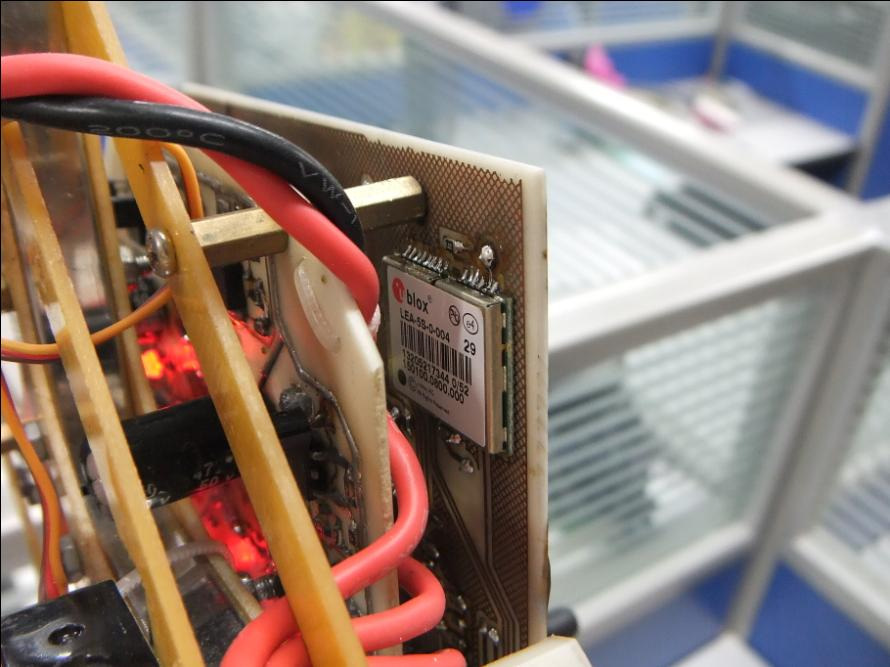
ALTERA的SOPCBUILDERT具中提供了UART的IP核,可以轻易实现UART通讯。另外该模
块支持ub劝&议输出,其中可见卫星,U TC ,经纬信息等等都通过2进制表示,而不是NMEA协议 中的ASCLL编码方式,为后期的数据处理过程提供了不少方便。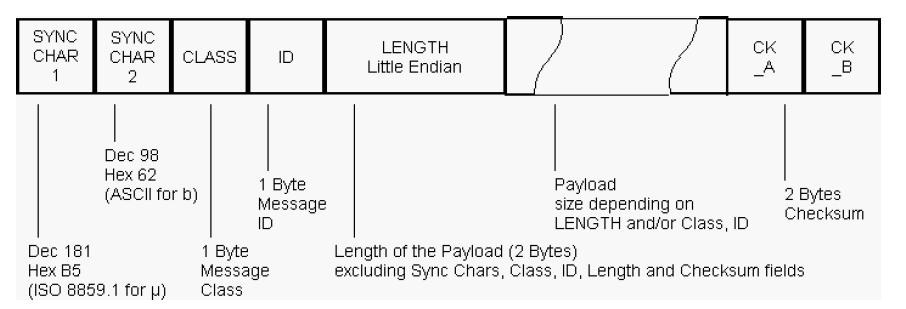 ubxfe议有完整的数据帧协议,其中包含两个包头字节厕b ,后紧跟一个字节的消息类代码, 指示这个包的数据类别,后跟一字节消息代码,后包含两字节数据长度信息,后跟数据部分和两
ubxfe议有完整的数据帧协议,其中包含两个包头字节厕b ,后紧跟一个字节的消息类代码, 指示这个包的数据类别,后跟一字节消息代码,后包含两字节数据长度信息,后跟数据部分和两
个校验位。在不需要直接输出GPS信息到ASCLL输出设备的场合,采用ubxfe议明显比较合适。 该gps模块手册说明支持4hz输 出 (实测5hz也是有效的),启动后GPS默认为NMEA协议1hz 刷新率,只需要发送一组指令到GPS完成初始化,便可调整到更高的波特率并以4商出信息。对
于飞行器来说,高刷新率意味着算法部分有更大的空间获得及时的、稳定的位置信息,本设计对
于GPS部分的数据处理方案是,先对经纬坐标做均值处理,并在中间值上下各容许一段空间的漂
移以防止GPS数据的不稳定性导致飞行器过度调整。同样的,由于GPS输出的坐标信息很难与上
位机要求的航迹点坐标完全重合,因此对于目标航迹点的到达判断也是采用类似方案,即到达以
目标点为中心的“小方块”以内,即认为到达,准备前往下一个航迹点。
3.2 磁阻传感器
由于慢速飞行时,GPS所提供的航向以及速度等信息并不准确,而自动导航功能要求飞行器
实时了解机头的朝向,因此我们在主控板上另外安装了一颗磁阻传感器(琥珀中的就是它)
阻传感器用以检测地磁场,并通过反三角函数计算与地球磁北夹角,从而得出航向数据。
它通过12C总线与核心FPGA通讯,磁阻传感器作为从机有固定的读写地址,每次需要数据时只需
要按手册说明发送SLA+R便可获知全部3轴的磁场强信息,供算法处理。
3.3 气压计
飞行器定高航行功能主要通过气压传感器实现。随着海拔高度的上升,气压呈下降趋势,通过
查阅相关方面高手的研究资料了解到,在1500米范围内,气压与高度的关系可认为大致呈线性。
高度每上升10米,气压下降1.1mbaro 这是一个很小的数值,因此我们将气压计输出经过运放高倍 率放大以获得更高的分辨率。同时需要说明的是,大气压强随天气等原因变化比较明显,所以即
便在同一地点不同时间测试,气压计的输出也是不同的,因此气压计只能在一个相对较短的时间
内提供相对高度信息,每次起飞前,需要根据地面气压校准相对0高度,才能获得比较合理的输出
数据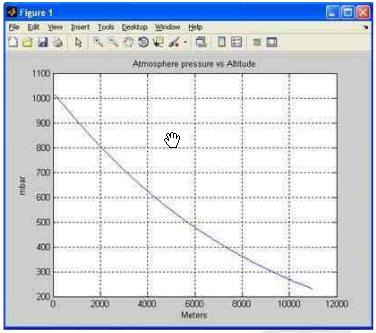



评论(0)
您还未登录,请登录后发表或查看评论