
项目描述
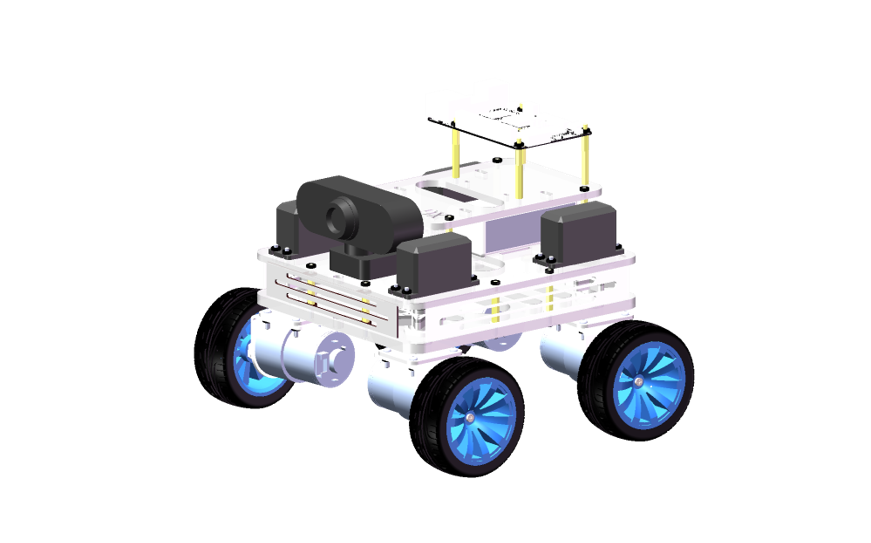
四驱四转移动机器人利用了四个独立的编码电机作为整车的驱动部分,略去了传统车辆结构里机械传动装置,不仅节约了空间,还优化了整车布局结构。同时在轮毂电机的控制上,只需要电机和控制器就可以完成,提高了控制的准确性和有效性。在四个轮毂上加上四个独立的转向舵机,使每个舵机独立转向,这样就形成了四轮独立转向。相对于传统前轮转向方式,四轮独立转向的结构和控制方式能够让车辆进行任意方向的行驶,原地掉头等等,可有效减小停泊时对空间的需求,增加了车辆的转向自由度,丰富了使用场景。四转四驱结构拥有多种运动模式,双阿克曼模式可实现广范围的转弯半径斜移模式可实现-90°到+90°转向,保障车身灵活、稳定、快速通过特定狭小区域,拓展机器人狭小空间应用场景;通过运动学和动力学设计,“X”形驻车,可长时间保持驻车状态,不损耗电机,提升电机效能。
同时采用旭日X3派作为主控,运行ROS2系统,搭配摄像头、激光雷达和手柄模块,使得机器人能够三维视觉建图、AI视觉识别、寻迹、手柄遥控和多姿态运转等功能得以实现。
硬件和材料列表
|
元器件名称 |
个数 |
功能 |
|
旭日x3开发板4GB |
1 |
主控板 |
|
ROS驱动控制板 |
1 |
驱动板 |
|
霍尔编码电机 |
4 |
作为轮毂驱动 |
|
金属数字舵机 |
4 |
作为轮毂转向 |
|
激光雷达 |
1 |
三维建图 |
|
usb麦克风摄像头 |
1 |
视觉识别和语音录入 |
|
机器人底盘 |
1 |
支撑 |
|
12V电源 |
1 |
供电 |
|
Xbox one手柄 |
1 |
遥控 |
|
连接线 |
若干 |
传输数据 |
开发环境
C,python,ROS2
安装部署过程展示
项目笔记
XG-robot四驱四转智能小车——旭日X3派系统安装及python相关环境搭建XG-robot四驱四转智能小车——旭日X3派ROS2系统安装及视觉检测
XG-robot四驱四转智能小车——旭日X3派连接蓝牙与控制小海龟(ROS2)
XG-robot四驱四转智能小车——使用旭日X3派控制小车
XG-robot四驱四转智能小车-- web移动端显示视频流
安全事项
无参考文献





评论(0)
您还未登录,请登录后发表或查看评论