


Summary
上一节“判断稳定性”从传递函数角度判断了系统的稳定性:传递函数极点a+bi的实部a为负,则系统稳定。背后的含义是:扰动的时域响应随着t的增长趋于0( ),扰动响应趋于0,系统自然稳定。
对于高阶系统,直接求解极点比较费事,因此劳斯(E.J.Routh)在1877年提出了劳斯判据。劳斯判据是一种借助特征方程系数/劳斯表来辅助判断根正负的方法,这里的根即传递函数的极点。所以劳斯判据通过下面这条逻辑链和前面的知识联系上了:
“劳斯判据(特征方程系数/劳斯表)→ 方程根的正负 → 传递函数极点 → 扰动的时域响应 → 稳定性”
劳斯判据的内容
劳斯判据用起来很简单,两步走。
1)根据特征方程列写劳斯表
设特征方程为:
则劳斯表为:
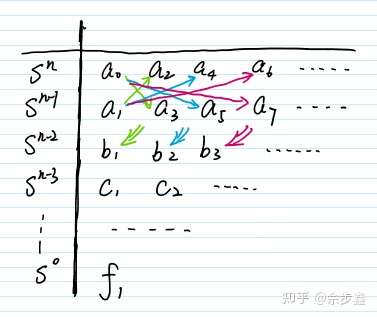
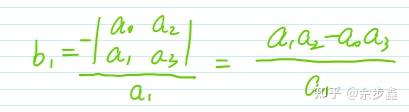
借助行列式更方便记忆,每元素来自上两行,将第一列元素配上右上方元素,构成行列式,最后除以上一行的第个元素。例如b1:
2)根据劳斯表判断稳定性
- 第一列所有系数为正,则根都在复平面左半平面,系统稳定;
- 第一列有符号变换,变化的次数等于复平面右办平面根的个数,系统不稳定。
使用劳斯判据时会有两个特例:
- Case 1: 某行第一个元素是0,但后面元素不是0。处理方法:用一个很小数代替0,接着往下算。
- Case 2: 某行全是0。处理办法:用上一行的系数构造多项式,对s求导后替代全0行的元素,接着往下算。
拓展
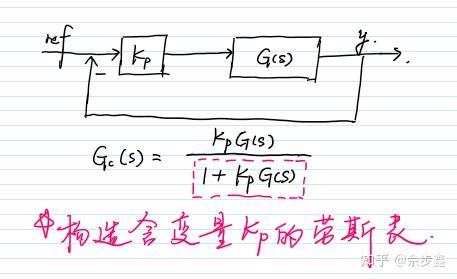
劳斯判据的进阶用法:判断控制器参数的范围。以下图比例控制器为例,我们可以写出含有Kp参数的劳斯表,从而用“第一列元素为正”的判据,解出系统稳定前提下参数Kp的范围。
在Matlab社区,有人写出了构造输出劳斯表的小程序,并能重新配置不稳定系统的极点。感兴趣的同学可进下面传送门。
总结
劳斯判据是一种借助特征方程系数来判断系统稳定性的方法,最终的落脚点还是“传递函数极点在复平面左半平面”,对于高阶系统,使用起来尤为方便。此外,借助劳斯表还能辅助判断控制器参数的范围,是一种活用知识的表现。



评论(1)
您还未登录,请登录后发表或查看评论