


我们在学习和使用PID的时候,可能会有很多电机的选择。然而不同的电机使用的PID参数是不太一样的。所以我们需要认识电机和驱动器。
1 电机有什么类型
1.1 电机的简介
电机是一种可以在电能和机械能的之间相互转换的设备,其中发电机是将机械能转换为电能,电动机是将电能转换为机械能。发电机的主要用于产生电能,用途单一,但是电动机主要用于产生机械能,用途极其广泛。
电机是一种可以实现电能与机械能之间相互转换的设备,其可分为电动机和发电机两种,前者能够把电能转换成机械能,而后者则能把机械能转换成电能。
1.2 电机的分类
电机种类多种多样,自然分类也是多种多样的,可以按照工作
电源种类划分、按照结构和工作原理划分、按照启动与运行方式划分``、按照用途划分、按照运转速度划分等等。可以说是分类五花八门,但是在实际应用中,工程师会根据电机的特性来分。例如:对速度要求高的会选择直流电机,对精度要求高的会选择步进电机等等;接下来我们将会从众多类型中的电机中选择几个具有
代表性、普遍性的常用电机。电机的种类繁多,其可按工作电源、用途、转子结构、运转速度等进行分类。这里我们以用途为例,对常见的电机进行分类,具体的框图如下图
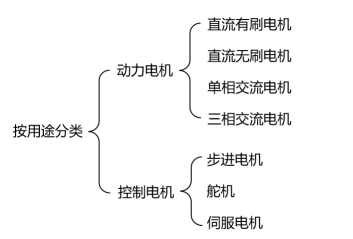
1.2.1 直流电机
在直流电机中还分为普通的直流电机、直流减速电机,有刷和无刷,共分为:
-
直流有刷电机- 直流有刷电机(BDC)是一种内含电刷装置,可以将直流电能转换成机械能的电动机。在允许的范围之内,只需要调整电压,即可调整它的转速,因此这类电机拥有良好的调速性能。我们的平衡小车,平衡自行车等等可以使用这一类电机进行制作。

-
直流有刷减速电机- 无刷电机是指无电刷和换向器(或集电环)的电机,又称无换向器电机,它由电动机主体和驱动器组成,是一种典型的机电一体化产品。早在十九纪,就已经出现了无刷形式的电机,即交流鼠笼式异步电动机,但是,其有着许多无法克服的缺陷,以至于人们不断地探索更好的电机技术。直到上世纪中叶,晶体管诞生了,晶体管换向电路代替了传统的电刷与换向器结构,这种新型无刷电机克服了第一代无刷电机的缺陷。我们的无人机可以使用这一类电机进行制作。

-
直流无刷电机 -
直流无刷减速电机
这四种电机。从字面意思上就可以想象的到,普通的直流电机和直流减速电机相差的只有“减速”,它们在构造上相差的是一个减速齿轮组。普通的直流电机当空载时,电机的转速由电压决定; 直流减速电机的转速由齿轮组和电压决定;齿轮组的作用是,提供较低的转速,较大的力矩;同时不同的减速比会提供不同的转速和力矩。这样就大大提高了减速电机的使用率。
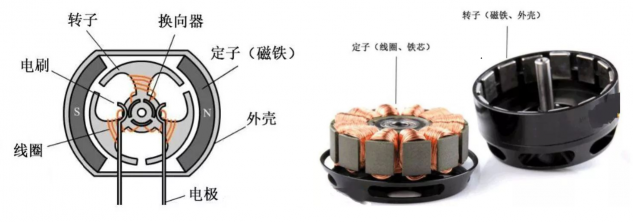
接下来就是有刷与无刷的区别:有刷和无刷的字面意思是有无碳刷;有刷电机电机工作时需要线圈和换向器旋转,磁钢和碳刷不转,线圈电流方向的交替变化是随电机转动的换相器和电刷来完成的。无刷直流电动机是采用半导体开关器件来实现电子换向的,使用电子开关器件代替传统的接触式换向器和电刷。
1.2.2 步进电机
步进电机是一种将电脉冲信号转变为角位移或线位移的开环控制电机,是现代数字程序控制系统中的主要执行元件,应用极为广泛。在非超载的情况下,步进电机的转速、停止的位置只取决于脉冲信号的频率和脉冲个数,不受负载变化的影响。

- 步进电机是一种可以将脉冲信号转换为角位移或线位移的开环控制电机,在空载低频的情况下,一个脉冲就是一步,可以精准的控制旋转角度; 步进电机按照构造方式分类,分为三类分别是
反应式、永磁式和混合式。
| 构造方式 | 特性说明 |
|---|---|
| 反应式 | 结构简单、成本低、步距角小,可达 1.2°、但动态性能差、效率低、发热大,可靠性难保证。 |
| 永磁式 | 其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为 7.5° 或 15°)。 |
| 混合式 | 其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 |
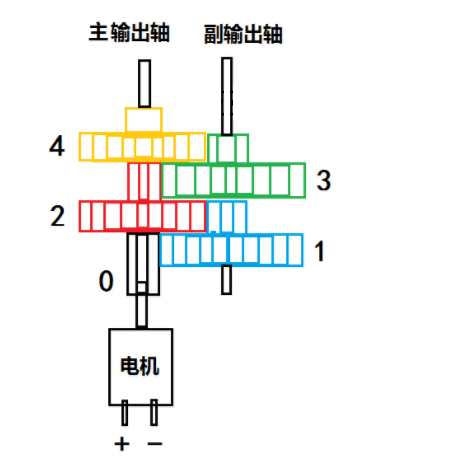
按照定子上绕组可分为二相、三相和五相等系列,但是最受欢迎的是两相混合式步进电机,约占97% 上的市场份额,基本上是占据了整个市场;所以后面也会主要针对两相混合式步进电机进行讲解。你一定听过 42 步进电机,那么“42”指的是什么呢?下面这张图会告诉你“42”到底是什么意思。

- 42 步进电机是指步进的尺寸,混合式步进电机一般都是正方形,外框尺寸为 42mm*42mm;除 42之外还有 57 步进电机,86 步进电机,也都是因外框尺寸而得名的。
1.2.3 伺服电机
“伺服”一词是来源于希腊语“奴隶”的意思,那么伺服电机也可以理解为绝对服从控制信号指挥电机,所以伺服电机是指在伺服系统中被控制的电机。如果单指一个电机的话,那只能算一个被控的机械元件,但是加上闭环控制系统就可以称之为伺服系统中的电机。伺服电机是在伺服系统中控制机械元件运转的电动机,它搭配上驱动器,形成一个完整的伺服系统,就能够精准地控制速度、位置等。伺服电机具有线性度高、起动转矩大、运行范围较广、无自转现象等显著特点。

伺服电机分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
1.2.3.1 直流伺服电机特性
- 机械特性在输入的电枢电压保持不变时,电机的转速随电磁转矩变化而变化的规律
- 调节特性直流电机在一定的电磁转矩(或负载转矩)下电机的稳态转速随电枢的控制电压变化而变化
- 动态特性从原来的稳定状态到新的稳定状态,存在一个过渡过程,这就是直流电机的动态
1.2.3.2 交流伺服电机特性
- 无电刷和换向器,因此工作可靠,对维护和保养要求低
- 定子绕组散热比较方便
- 惯量小,易于提高系统的快速性
- 适应于高速大力矩工作状态
1.2.4 舵机
舵机是一种“特殊”的直流电机,其构造不仅只有电机部分,而且还自带一个控制器,所以舵机本身就是一个闭环的控制系统(伺服系统)。当我们给舵机发送指令信号时,它可以将指令信号变换为输出轴的角度并保持住,即便是负载发生了变化,它也能够进行自动调节。
舵机是一种常见的伺服电机,由小型直流电机、控制电路板、电位计和齿轮组构成,舵机的用途广泛;舵机可按照信号类型划分、按照齿轮划分、按照用途划分;舵机分 90°、180°、270° 和 360°舵机,其中 180° 的舵机最为常见。

按照信号类型划分为模拟信号舵机和数字信号舵机
模拟舵机:无 MCU 微控制器,电路为模拟电路,同样的舵机之间会有性能差异数字舵机:有 MCU 控制器,一般内部采用算法优化,性能比模拟舵机好
按照齿轮划分为金属齿轮舵机和塑料齿轮舵机:
金属齿轮舵机:适用于大扭力和高速场合塑料齿轮舵机:成本低适用于中低扭矩场合

1.3 各类电机的特点
几种常见电机的特点。
| 电机类别 | 特点 |
|---|---|
| 直流有刷电机 | 驱动简单,成本低廉,但是噪音大,故障较多,寿命也相对较短。 |
| 直流无刷电机 | 噪音低,运转流畅,高速,寿命更长,但是控制较为复杂。 |
| 舵机 | 自成闭环控制系统,角度控制优秀,价格低,但是带负载的能力较弱。 |
| 步进电机 | 常用于对精度要求不高的场合。结构简单,驱动方便,没有积累误差,不过因为其可能存在丢步现象, |
| 伺服电机 | 速度、位置控制精确,可低速运行,效率高,寿命长,可以说是目前最为可靠的一类电机。但是价格较高。 |
1.4 了解电机常用名词
- ①
转速:电机输出轴的速度,一般单位是 r/min(转每分钟),也常用 RPM 表示。 - ②
输出扭矩:表示了电机输出轴可以输出力的大小,单位一般为 N·m 或者 kg·cm。 - ③
工作电压:电机正常工作的电压。 - ④
额定电流:电机正常工作时的电流。 - ⑤
堵转电流:电机负载过大,驱动力不足,发生堵转时的电流。
2 驱动器有哪一些?
2.1 有刷电机驱动器
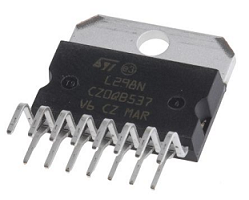
直流有刷电机的驱动方法其实本质上是使用 H 桥电路进行驱动,核心电路 H 桥加上一些必要的外围电路,共同组成直流有刷电机的驱动器。H 桥本身可作为集成电路使用,也可由分立元件构成。集成电路形式的 H 桥一般用于中小功率需求的应用,或者是对电路面积有要求的场合。分立元件形式的 H 桥通常用于大功率或者超大功率需求的应用,主要由 MOSFET 或 IGBT 晶体管组成。不过 MCU 的引脚是无法直接驱动 MOS 管等元件的,需要加上专用的 MOS 管驱动芯片。下图是一款经典的直流有刷电机驱动芯片 L298N,其内部集成了两个 H 桥。
2.2 无刷电机驱动器
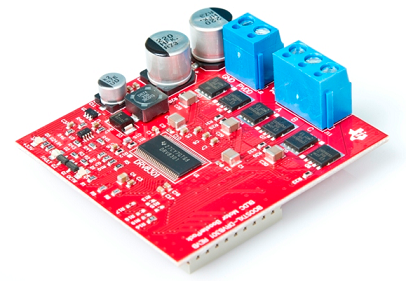
无刷电机也是使用 H 桥电路进行驱动的,只不过是电机的每一相都用一个半桥电路驱动,一个三相无刷电机总共需要三个半桥,而不像直流有刷电机驱动那种使用全桥电路。跟直流有刷电机电机一样,无刷电机驱动器也分集成电路形式和分立元件形式,但因为无刷电机需要换相操作,就算是分立元件形式也只是把半桥电路给独立了出来。类似于下图这样的,就是一款无刷电机驱动器。
2.3 步进电机驱动器
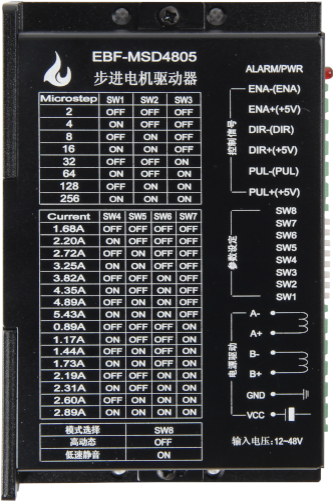
步进电机不能直接接到直流或交流电源上工作,必须接入专用的驱动器才能正常使用。控制器将步进脉冲和方向信号发送到步进电机驱动器,驱动器将控制器发来的步进脉冲信号转换为激励步进电动机旋转所需的功率信号。步进电机驱动器通常都带有细分功能,可以对步距角和电流进行细分,从而实现更请准的控制和更低的噪声震动。
2.4 伺服电机驱动器
伺服电机驱动器(servo drives),是一种用来驱动和控制伺服电机的控制器,属于伺服系统的一部分。伺服电机驱动器接收和放大来自控制系统的命令信号,并将电流传输给伺服电机,以产生与命令信号成比例的运动。这些命令信号通常对伺服电机的位置、速度和力矩等参数进行控制,实现高精度的传动系统定位。附在伺服电机上的传感器将电机的实际状态反馈给伺服驱动器,驱动器将实际电机状态与来自控制系统的命令状态进行比较。然后驱动器改变传给电机的电压、频率或脉冲宽度,以纠正任何偏离命令的状态。

3 PID应用
在我们生活开发有很多作品都应用到电机和PID。
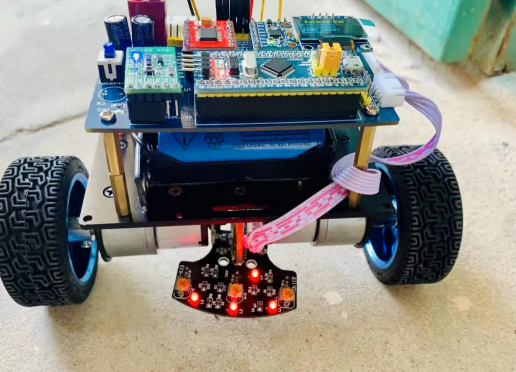
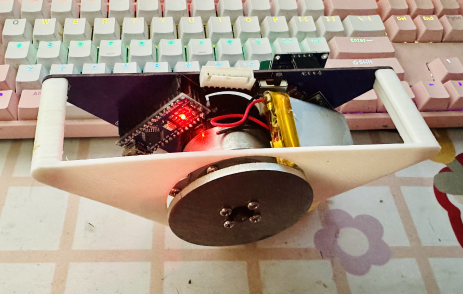
- 平衡小车
- 平衡三棱柱



评论(0)
您还未登录,请登录后发表或查看评论