

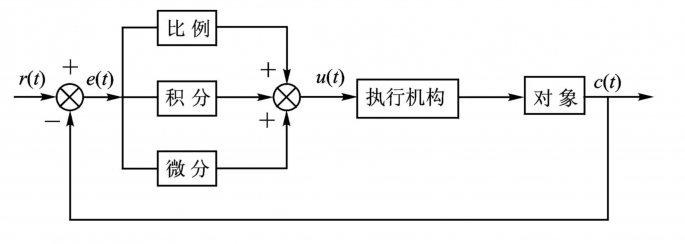
简介
位置环 PID 控制的原理非常简单,我们用编码器计数总值代表电机的位置,然后把 PID控制流程中的控制对象换成电机位置即可。

步骤
- ①设定一个目标位置值
- ②读取当前电机位置值
- ③对所读到的位置数据进行pid计算
- ④将计算结果设置为电机速度目标值
- ⑤对电机当前速度数据进行pid算法计算
- ⑥根据计算结果配置PWM进而控制电机
第⑧的速度闭环控制为增量式 PID 控制,增量相当于加速度,由加速度改变速度,体现在速度控制值自增部分:
ControlVelocity+=Velcity_Kp_(Bias-Last_bias)+Velcity_Ki_Bias;
而这个实验的位置闭环控制,则相当于输出直接为目标速度,由速度改变位置,不需要增量控制。
第⑧节速度闭环控制的当前速度值直接使用编码器读数 Encoder 即可。当前位置值获取对 Encoder 进行累加,相当于对速度进行积分得
到位移。该操作将在 TIM2 定时中断服务函数中进行。
位置闭环部分代码
Bias=TargetPosition-CurrentPosition; //求位置偏差
Integral_Bias+=Bias;
ControlVelocity=Position_Kp*Bias + Position_Ki*Integral_Bias +Position_Kd*(Bias-Last_bias);
- 其中 Bias 是位置偏差,Integral_Bias 是偏差积分。下面介绍一下 Kp、Ki、Kd 部分的作用。
- Position_Kp_Bias:偏差越大,速度(ControlVelocity)越大,使电机尽快到达目标位置。_
- _Position_Ki_Integral_Bias:偏差积分,用于减小稳态误差。例如当有外力阻挡电机,使电机无法达到目标位置时,偏差不断积分,加大转矩,克服外力。同时也有解决电机控制 PWM 死区的作用。直流电机在 PWM 很小时,会直接停止不再驱动,特别是在电源电压较小时,这一死区现象会更加明显。
- Position_Kd*(Bias-Last_bias):(Bias-Last_bias)相当于速度(偏差变小的速度,相当于靠近目标位置的速度),只是极性相反,就可以用于限制速度,提高控制稳定性。
编码器

编码器代码说明
相关变量定义
extern int Encoder, CurrentPosition; //当前速度、当前位置
extern int TargetVelocity, TargetCircle, CurrentPosition, Encoder,PWM; //=目标速度、目标圈数、编码器读数、PWM 控制变量
extern float Velcity_Kp, Velcity_Ki, Velcity_Kd; //相关速度 PID 参数
extern float Position_Kp, Position_Ki, Position_Kd; //相关位置 PID 参数
extern int MortorRun; //允许电机控制标志位
TIM2 定时中断服务函数
速度积分获取当前位置,根据电机使能标志位决定进行位置闭环控制或者电机停止。
void TIM2_IRQHandler()
{
if(TIM_GetITStatus(TIM2, TIM_IT_Update)==1) //当发生中断时状态寄存器(TIMx_SR)的 bit0 会被硬件置 1
{
Encoder=Read_Encoder(); //读取当前编码器读数,即速度
CurrentPosition+=Encoder; //编码器读数(速度)积分得到位置
if(MortorRun) //如果按键按下,运行电机控制程序
{
PWM=Position_FeedbackControl(TargetCircle, CurrentPosition);
//位置闭环控制
SetPWM(PWM); //设置 PWM
}
else
PWM=0,SetPWM(PWM); //如果按键再次按下,电机停止
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //状态寄存器(TIMx_SR)的bit0 置 0
}
}
位置闭环控制函数
使用电机的电机误差系数 1.04
int Position_FeedbackControl(float Circle, int CurrentPosition)
{
float TargetPosition,Bias, ControlVelocity; //定义相关变量
static float Last_bias, Integral_Bias; //静态变量,函数调用结束后其值依然存在
TargetPosition=Circle*1040; //目标位置=目标圈数*1040
//10ms 读取一次编码器(即 100HZ),电机减速比 为 20,霍尔编码器精度 13,AB 双相组合得到 4 倍频,
//则转 1 圈编码器读数为 20*13*4=1040,电机转速=Encoder*100/1040r/s 使用定时器 2
//1.04 是误差系数,电机本身存在误差,可根据实 际情况调整该系数以提高控制精度
Bias=TargetPosition-CurrentPosition; //求位置偏差
Integral_Bias+=Bias;
if(Integral_Bias> 970) Integral_Bias= 970; //积分限幅 防止到达目标位置 后过冲
if(Integral_Bias<-970) Integral_Bias=-970; //积分限幅 防止到达目标位置后过冲
ControlVelocity=Position_Kp*Bias+Position_Ki*Integral_Bias+Position_Kd*(Bias-Last_bias); //增量式 PI 控制器
//Position_Kp*Bias 偏差越大速度越大
//Position_Ki*Integral_Bias 减小稳态误差
//Position_Kd*(Bias-Last_bias) 限制速度
Last_bias=Bias;
return ControlVelocity; //返回速度控制值
}
位置环PID调参
位置环调参和速度环有很大区别,按经验来说,一般用不到I和D,我们只要调整P就好。
从0开始逐步增大P,直到电机在前往目标位置的过程中是满速,而到达目标位置后不会超调、震荡就行,位置环调好后曲线。
实验操作
- 编码器初始化函数使能 GPIO、TIM 时钟→初始化 GPIO 引脚→初始化定时器→初始化编码器→清除相关标志位、数值→使能相关功能、定时器。
- 读取编码器计数值函数读取编码器计数并判断方向正反,读取完后将计数值清零。
- 定时读取编码器数值初始化函数使能TIM2时钟→初始化定时器→使能中断→初始化中断分组→使能定时器。
- TIM2 中断服务函数调用读取编码器计数值函数并进行位置闭环控制。
- 电机将进行位置闭环控制:旋转 10 圈。同时 OLED 显示屏会显示目标位置值(Target_P)、当前位置值(Current_P)目标速度值(Target_V)、读取速度值(Current_V)和当前 PWM 值。
Code
encoder.c
#include "motorencoder.h"
extern int Encoder, CurrentPosition; //当前速度、当前位置
extern int TargetVelocity, TargetCircle, CurrentPosition, Encoder,PWM; //目标速度、目标圈数、编码器读数、PWM控制变量
extern float Velcity_Kp, Velcity_Ki, Velcity_Kd; //相关速度PID参数
extern float Position_Kp, Position_Ki, Position_Kd; //相关位置PID参数
extern int MortorRun; //允许电机控制标志位
/**************************************************************************
函数功能:编码器初始化函数
入口参数:无
返回 值:无
**************************************************************************/
void MotorEncoder_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义一个引脚初始化的结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//定义一个定时器初始化的结构体
TIM_ICInitTypeDef TIM_ICInitStructure; //定义一个定时器编码器模式初始化的结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能TIM4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能CPIOB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //TIM4_CH1、TIM4_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据GPIO_InitStructure的参数初始化GPIO
TIM_TimeBaseStructure.TIM_Period = 0xffff; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler = 0; // 预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct的参数初始化定时器TIM4
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); //使用编码器模式3:CH1、CH2同时计数,为四分频
TIM_ICStructInit(&TIM_ICInitStructure); //把TIM_ICInitStruct 中的每一个参数按缺省值填入
TIM_ICInitStructure.TIM_ICFilter = 10; //设置滤波器长度
TIM_ICInit(TIM4, &TIM_ICInitStructure); //根TIM_ICInitStructure参数初始化定时器TIM4编码器模式
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); //更新中断使能
TIM_SetCounter(TIM4,0); //初始化清空编码器数值
TIM_Cmd(TIM4, ENABLE); //使能定时器4
}
/**************************************************************************
函数功能:读取TIM4编码器数值
入口参数:无
返回 值:无
**************************************************************************/
int Read_Encoder(void)
{
int Encoder_TIM;
Encoder_TIM=TIM4->CNT; //读取计数
if(Encoder_TIM>0xefff)Encoder_TIM=Encoder_TIM-0xffff; //转化计数值为有方向的值,大于0正转,小于0反转。
//TIM4->CNT范围为0-0xffff,初值为0。
TIM4->CNT=0; //读取完后计数清零
return Encoder_TIM; //返回值
}
/**************************************************************************
函数功能:TIM4中断服务函数
入口参数:无
返回 值:无
**************************************************************************/
void TIM4_IRQHandler(void)
{
if(TIM4->SR&0X0001)//溢出中断
{
}
TIM4->SR&=~(1<<0);//清除中断标志位
}
/**************************************************************************
函数功能:通用定时器2初始化函数,
入口参数:自动重装载值 预分频系数 默认定时时钟为72MHZ时,两者共同决定定时中断时间
返回 值:无
**************************************************************************/
void EncoderRead_TIM2(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue; //定义一个定时中断的结构体
NVIC_InitTypeDef NVIC_InitStrue; //定义一个中断优先级初始化的结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能通用定时器2时钟
TIM_TimeBaseInitStrue.TIM_Period=arr; //计数模式为向上计数时,定时器从0开始计数,计数超过到arr时触发定时中断服务函数
TIM_TimeBaseInitStrue.TIM_Prescaler=psc; //预分频系数,决定每一个计数的时长
TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up; //计数模式:向上计数
TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV1; //一般不使用,默认TIM_CKD_DIV1
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStrue); //根据TIM_TimeBaseInitStrue的参数初始化定时器TIM2
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //使能TIM2中断,中断模式为更新中断:TIM_IT_Update
NVIC_InitStrue.NVIC_IRQChannel=TIM2_IRQn; //属于TIM2中断
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE; //中断使能
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1; //抢占优先级为1级,值越小优先级越高,0级优先级最高
NVIC_InitStrue.NVIC_IRQChannelSubPriority=1; //响应优先级为1级,值越小优先级越高,0级优先级最高
NVIC_Init(&NVIC_InitStrue); //根据NVIC_InitStrue的参数初始化VIC寄存器,设置TIM2中断
TIM_Cmd(TIM2, ENABLE); //使能定时器TIM2
}
/**************************************************************************
函数功能:TIM2中断服务函数 定时读取编码器数值并进行位置闭环控制 10ms进入一次
入口参数:无
返回 值:无
**************************************************************************/
void TIM2_IRQHandler()
{
if(TIM_GetITStatus(TIM2, TIM_IT_Update)==1) //当发生中断时状态寄存器(TIMx_SR)的bit0会被硬件置1
{
Encoder=Read_Encoder(); //读取当前编码器读数,即速度
CurrentPosition+=Encoder; //编码器读数(速度)积分得到位置
if(MortorRun) //如果按键按下,运行电机控制程序
{
PWM=Position_FeedbackControl(TargetCircle, CurrentPosition); //位置闭环控制
SetPWM(PWM); //设置PWM
}
else PWM=0,SetPWM(PWM); //如果按键再次按下,电机停止
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //状态寄存器(TIMx_SR)的bit0置0
}
}
/**************************************************************************
函数功能:速度闭环PID控制(实际为PI控制)
入口参数:目标速度 当前速度
返回 值:速度控制值
根据增量式离散PID公式
ControlVelocity+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差 以此类推
ControlVelocity代表增量输出
在我们的速度控制闭环系统里面,只使用PI控制
ControlVelocity+=Kp[e(k)-e(k-1)]+Ki*e(k)
**************************************************************************/
int Velocity_FeedbackControl(int TargetVelocity, int CurrentVelocity)
{
int Bias; //定义相关变量
static int ControlVelocity, Last_bias; //静态变量,函数调用结束后其值依然存在
Bias=TargetVelocity-CurrentVelocity; //求速度偏差
ControlVelocity+=Velcity_Kp*(Bias-Last_bias)+Velcity_Ki*Bias; //增量式PI控制器
//Velcity_Kp*(Bias-Last_bias) 作用为限制加速度
//Velcity_Ki*Bias 速度控制值由Bias不断积分得到 偏差越大加速度越大
Last_bias=Bias;
return ControlVelocity; //返回速度控制值
}
/**************************************************************************
函数功能:位置式PID控制器
入口参数:目标圈数(位置) 当前位置
返回 值:速度控制值
根据位置式离散PID公式
pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差
∑e(k)代表e(k)以及之前的偏差的累积和;其中k为1,2,,k;
pwm代表输出
**************************************************************************/
int Position_FeedbackControl(float Circle, int CurrentPosition)
{
float TargetPosition,Bias, ControlVelocity; //定义相关变量
static float Last_bias, Integral_Bias; //静态变量,函数调用结束后其值依然存在
TargetPosition=Circle*1040*1.04; //目标位置=目标圈数*1040
//10ms读取一次编码器(即100HZ),电机减速比为20,霍尔编码器精度13,AB双相组合得到4倍频,
//则转1圈编码器读数为20*13*4=1040,电机转速=Encoder*100/1040r/s 使用定时器2
//1.04是误差系数,电机本身存在误差,可根据实际情况调整该系数以提高控制精度
Bias=TargetPosition-CurrentPosition; //求位置偏差
Integral_Bias+=Bias;
if(Integral_Bias> 970) Integral_Bias= 970; //积分限幅 防止到达目标位置后过冲
if(Integral_Bias<-970) Integral_Bias=-970; //积分限幅 防止到达目标位置后过冲
ControlVelocity=Position_Kp*Bias+Position_Ki*Integral_Bias+Position_Kd*(Bias-Last_bias); //增量式PI控制器
Last_bias=Bias;
return ControlVelocity; //返回速度控制值
}
encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
#include "sys.h"
#include "TB6612.h"
void MotorEncoder_Init(void);
int Read_Encoder(void);
void EncoderRead_TIM2(u16 arr, u16 psc);
int Position_FeedbackControl(float Circle, int CurrentVelocity);
int Velocity_FeedbackControl(int TargetVelocity, int CurrentVelocity);
int PWM_Restrict(int PWM_P, int TargetVelocity);
#endif
main.c
#include "delay.h"
#include "usart.h"
#include "TB6612.h"
#include "motorencoder.h"
#include "usart.h"
#include "led.h"
#include "oled.h"
#include "key.h"
int TargetVelocity=0, TargetCircle=10, CurrentPosition, Encoder, PWM; //目标速度、目标圈数(位置)、编码器读数、PWM控制变量
float Velcity_Kp=20, Velcity_Ki=5, Velcity_Kd; //相关速度PID参数
float Position_Kp=120, Position_Ki=0.1, Position_Kd=400; //相关位置PID参数
int MortorRun; //允许电机控制标志位
/**************************************************************************
函数功能:OLED显示屏显示内容
入口参数:无
返回 值:无
**************************************************************************/
void Oled_Show(void)
{
OLED_Refresh_Gram(); //刷新显示屏
OLED_ShowString(00,00,"V_P Feedback"); //速度闭环控制
//显示目标位置,分正负
OLED_ShowString(00,10,"Target_P :");
if(TargetCircle>=0)
{
OLED_ShowString(80,10,"+");
OLED_ShowNumber(90,10,TargetCircle*1040*1.04,5,12); //1.04是误差系数,电机本身存在误差,可根据实际情况调整该系数以提高控制精度
}
else
{
OLED_ShowString(80,10,"-");
OLED_ShowNumber(90,10,-TargetCircle*1040*1.04,5,12); //1.04是误差系数,电机本身存在误差,可根据实际情况调整该系数以提高控制精度
}
//显示当前位置,分正负
OLED_ShowString(00,20,"Current_P:");
if(CurrentPosition>=0)
{
OLED_ShowString(80,20,"+");
OLED_ShowNumber(90,20,CurrentPosition,5,12);
}
else
{
OLED_ShowString(80,20,"-");
OLED_ShowNumber(90,20,-CurrentPosition,5,12);
}
//显示目标速度,分正负
OLED_ShowString(00,30,"Target_V :");
if(TargetVelocity>=0)
{
OLED_ShowString(80,30,"+");
OLED_ShowNumber(90,30,TargetVelocity,5,12);
}
else
{
OLED_ShowString(80,30,"-");
OLED_ShowNumber(90,30,-TargetVelocity,5,12);
}
//显示当前速度,即编码器读数,分正负
OLED_ShowString(00,40,"Current_V:");
if(Encoder>=0)
{
OLED_ShowString(80,40,"+");
OLED_ShowNumber(90,40,Encoder,5,12);
}
else
{
OLED_ShowString(80,40,"-");
OLED_ShowNumber(90,40,-Encoder,5,12);
}
//显示速度控制值,即PWM,分正负
OLED_ShowString(00,50,"PWM :");
if(PWM>=0)
{
OLED_ShowString(80,50,"+");
OLED_ShowNumber(90,50,PWM,5,12);
}
else
{
OLED_ShowString(80,50,"-");
OLED_ShowNumber(90,50,-PWM,5,12);
}
}
/**************************************************************************
函数功能:主函数
入口参数:无
返回 值:无
**************************************************************************/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组
delay_init(); //延迟函数初始化
JTAG_Set(JTAG_SWD_DISABLE); //关闭JTAG才能开启OLED显示屏
LED_Init(); //LED灯初始化
OLED_Init(); //OLED显示屏初始化
//uart_init(9600); //串口初始化
MotorEncoder_Init(); //编码器初始化 使用定时器4
TB6612_Init(7199, 0); //电机驱动外设初始化 使用定时器3
EncoderRead_TIM2(7199, 99); //10ms读取一次编码器(即100HZ),电机减速比为20,霍尔编码器精度13,AB双相组合得到4倍频,
//则转1圈编码器读数为20*13*4=1040,电机转速=Encoder*100/1040r/s 使用定时器2
delay_ms(2000); //延迟等待初始化完成
while(1)
{
delay_ms(5);
LED=0; //LED灯闪烁
if(KEY_Scan())MortorRun=!MortorRun; //按下按键MortorRun取反
Oled_Show(); //OLED显示屏显示内容
}
}
位置闭环控制
设定前 3 秒目标位置为 2 圈,则电机转(2-0)=2 圈;3 秒后目标位置为-1圈,则电机转(-1-2)=-3 圈。
在 TIM2 定时中断服务函数中添加一个静态变量 TimeCount,每次进入TIM2 定时中断服务函数 TimeCount 就加 1,而 TIM2 的的频率为 100HZ,即每10ms 进入一次 TIM2 定时中断服务函数,所以当 TimeCount=300 时即代表时间过去了 300*10ms=3s。
注意:目标速度 TargetVelocity 和目标圈数 TargetCircle 两个变量在该节中在定义时没有赋值,而是在 TIM2 定时中断服务函数中,允许电机运动了再赋值。
添加时间计数静态变量 TimeCount
static int TimeCount; //时间计数变量 静态变量,函数调用结束后其值依然存在
时间逻辑控制程序
TimeCount++;
if(TimeCount<=300)TargetCircle=2; //前 3 秒=300*10ms目标位置=2*1040*(正转 2 圈)
else if(300<TimeCount)TargetCircle=-1; //3 秒后 目标位置=-1*1040 -1-2=-3(反转 3 圈)
PWM=Position_FeedbackControl(TargetCircle, CurrentPosition);//位置闭环控制
实验操作
- 编码器初始化函数使能 GPIO、TIM 时钟→初始化 GPIO 引脚→初始化定时器→初始化编码器→清除相关标志位、数值→使能相关功能、定时器。
- 读取编码器计数值函数读取编码器计数并判断方向正反,读取完后将计数值清零。
- 定时读取编码器数值初始化函数使能TIM2时钟→初始化定时器→使能中断→初始化中断分组→使能定时器。
- TIM2 中断服务函数调用读取编码器计数值函数并进行位置闭环控制。
实验效果
接通电源打开电源开关后,连接电机和控制器,按下用户按键,电机将进行位置闭环控制:前 3 秒正转 2 圈,3 秒后反转 3 圈;旋转过程中再次按下按键电机停止。同时 OLED 显示屏会显示目标位置值(Target_P)、当前位置值(Current_P)目标速度值(Target_V)、读取速度值(Current_V)和当前 PWM 值。
Code
encoder.c
#include "motorencoder.h"
//外部变量 extern说明改变量已在其它文件定义
extern int Encoder, CurrentPosition; //当前速度、当前位置
extern int TargetVelocity, TargetCircle, CurrentPosition, Encoder,PWM; //目标速度、目标圈数、编码器读数、PWM控制变量
extern float Velcity_Kp, Velcity_Ki, Velcity_Kd; //相关速度PID参数
extern float Position_Kp, Position_Ki, Position_Kd; //相关位置PID参数
extern int MortorRun; //允许电机控制标志位
/**************************************************************************
函数功能:编码器初始化函数
入口参数:无
返回 值:无
**************************************************************************/
void MotorEncoder_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure; //定义一个引脚初始化的结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;//定义一个定时器初始化的结构体
TIM_ICInitTypeDef TIM_ICInitStructure; //定义一个定时器编码器模式初始化的结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能TIM4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //使能CPIOB时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7; //TIM4_CH1、TIM4_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据GPIO_InitStructure的参数初始化GPIO
TIM_TimeBaseStructure.TIM_Period = 0xffff; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_Prescaler = 0; // 预分频器
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct的参数初始化定时器TIM4
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); //使用编码器模式3:CH1、CH2同时计数,为四分频
TIM_ICStructInit(&TIM_ICInitStructure); //把TIM_ICInitStruct 中的每一个参数按缺省值填入
TIM_ICInitStructure.TIM_ICFilter = 10; //设置滤波器长度
TIM_ICInit(TIM4, &TIM_ICInitStructure); //根TIM_ICInitStructure参数初始化定时器TIM4编码器模式
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE); //更新中断使能
TIM_SetCounter(TIM4,0); //初始化清空编码器数值
TIM_Cmd(TIM4, ENABLE); //使能定时器4
}
/**************************************************************************
函数功能:读取TIM4编码器数值
入口参数:无
返回 值:无
**************************************************************************/
int Read_Encoder(void)
{
int Encoder_TIM;
Encoder_TIM=TIM4->CNT; //读取计数
if(Encoder_TIM>0xefff)Encoder_TIM=Encoder_TIM-0xffff; //转化计数值为有方向的值,大于0正转,小于0反转。
//TIM4->CNT范围为0-0xffff,初值为0。
TIM4->CNT=0; //读取完后计数清零
return Encoder_TIM; //返回值
}
/**************************************************************************
函数功能:TIM4中断服务函数
入口参数:无
返回 值:无
**************************************************************************/
void TIM4_IRQHandler(void)
{
if(TIM4->SR&0X0001)//溢出中断
{
}
TIM4->SR&=~(1<<0);//清除中断标志位
}
/**************************************************************************
函数功能:通用定时器2初始化函数,
入口参数:自动重装载值 预分频系数 默认定时时钟为72MHZ时,两者共同决定定时中断时间
返回 值:无
**************************************************************************/
void EncoderRead_TIM2(u16 arr, u16 psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStrue; //定义一个定时中断的结构体
NVIC_InitTypeDef NVIC_InitStrue; //定义一个中断优先级初始化的结构体
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //使能通用定时器2时钟
TIM_TimeBaseInitStrue.TIM_Period=arr; //计数模式为向上计数时,定时器从0开始计数,计数超过到arr时触发定时中断服务函数
TIM_TimeBaseInitStrue.TIM_Prescaler=psc; //预分频系数,决定每一个计数的时长
TIM_TimeBaseInitStrue.TIM_CounterMode=TIM_CounterMode_Up; //计数模式:向上计数
TIM_TimeBaseInitStrue.TIM_ClockDivision=TIM_CKD_DIV1; //一般不使用,默认TIM_CKD_DIV1
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStrue); //根据TIM_TimeBaseInitStrue的参数初始化定时器TIM2
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //使能TIM2中断,中断模式为更新中断:TIM_IT_Update
NVIC_InitStrue.NVIC_IRQChannel=TIM2_IRQn; //属于TIM2中断
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE; //中断使能
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1; //抢占优先级为1级,值越小优先级越高,0级优先级最高
NVIC_InitStrue.NVIC_IRQChannelSubPriority=1; //响应优先级为1级,值越小优先级越高,0级优先级最高
NVIC_Init(&NVIC_InitStrue); //根据NVIC_InitStrue的参数初始化VIC寄存器,设置TIM2中断
TIM_Cmd(TIM2, ENABLE); //使能定时器TIM2
}
/**************************************************************************
函数功能:TIM2中断服务函数 定时读取编码器数值并进行位置闭环控制 10ms进入一次
入口参数:无
返回 值:无
**************************************************************************/
void TIM2_IRQHandler()
{
static int TimeCount; //时间计数变量 静态变量,函数调用结束后其值依然存在
if(TIM_GetITStatus(TIM2, TIM_IT_Update)==1) //当发生中断时状态寄存器(TIMx_SR)的bit0会被硬件置1
{
Encoder=Read_Encoder(); //读取当前编码器读数,即速度
CurrentPosition+=Encoder; //编码器读数(速度)积分得到位置
if(MortorRun) //如果按键按下,运行电机控制程序
{
TimeCount++;
if(TimeCount<=300)TargetCircle=2; //前3秒=300*10ms 目标位置=2*1040*(正转2圈)
else if(300<TimeCount)TargetCircle=-1; //3秒后 目标位置=-1*1040 -1-2=-3(反转3圈)
PWM=Position_FeedbackControl(TargetCircle, CurrentPosition); //位置闭环控制
SetPWM(PWM); //设置PWM
}
else PWM=0,SetPWM(PWM); //如果按键再次按下,电机停止
TIM_ClearITPendingBit(TIM2, TIM_IT_Update); //状态寄存器(TIMx_SR)的bit0置0
}
}
/**************************************************************************
函数功能:速度闭环PID控制(实际为PI控制)
入口参数:目标速度 当前速度
返回 值:速度控制值
根据增量式离散PID公式
ControlVelocity+=Kp[e(k)-e(k-1)]+Ki*e(k)+Kd[e(k)-2e(k-1)+e(k-2)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差 以此类推
ControlVelocity代表增量输出
在我们的速度控制闭环系统里面,只使用PI控制
ControlVelocity+=Kp[e(k)-e(k-1)]+Ki*e(k)
**************************************************************************/
int Velocity_FeedbackControl(int TargetVelocity, int CurrentVelocity)
{
int Bias; //定义相关变量
static int ControlVelocity, Last_bias; //静态变量,函数调用结束后其值依然存在
Bias=TargetVelocity-CurrentVelocity; //求速度偏差
ControlVelocity+=Velcity_Kp*(Bias-Last_bias)+Velcity_Ki*Bias; //增量式PI控制器
Last_bias=Bias;
return ControlVelocity; //返回速度控制值
}
/**************************************************************************
函数功能:位置式PID控制器
入口参数:目标圈数(位置) 当前位置
返回 值:速度控制值
根据位置式离散PID公式
pwm=Kp*e(k)+Ki*∑e(k)+Kd[e(k)-e(k-1)]
e(k)代表本次偏差
e(k-1)代表上一次的偏差
∑e(k)代表e(k)以及之前的偏差的累积和;其中k为1,2,,k;
pwm代表输出
**************************************************************************/
int Position_FeedbackControl(float Circle, int CurrentPosition)
{
float TargetPosition,Bias, ControlVelocity; //定义相关变量
static float Last_bias, Integral_Bias; //静态变量,函数调用结束后其值依然存在
TargetPosition=Circle*1040*1.04; //目标位置=目标圈数*1040
//10ms读取一次编码器(即100HZ),电机减速比为20,霍尔编码器精度13,AB双相组合得到4倍频,
//则转1圈编码器读数为20*13*4=1040,电机转速=Encoder*100/1040r/s 使用定时器2
//1.04是误差系数,电机本身存在误差,可根据实际情况调整该系数以提高控制精度
Bias=TargetPosition-CurrentPosition; //求位置偏差
Integral_Bias+=Bias;
if(Integral_Bias> 970) Integral_Bias= 970; //积分限幅 防止到达目标位置后过冲
if(Integral_Bias<-970) Integral_Bias=-970; //积分限幅 防止到达目标位置后过冲
ControlVelocity=Position_Kp*Bias+Position_Ki*Integral_Bias+Position_Kd*(Bias-Last_bias); //增量式PI控制器
Last_bias=Bias;
return ControlVelocity; //返回速度控制值
}
encoder.h
#ifndef __ENCODER_H
#define __ENCODER_H
#include "sys.h"
#include "TB6612.h"
void MotorEncoder_Init(void);
int Read_Encoder(void);
void EncoderRead_TIM2(u16 arr, u16 psc);
int Position_FeedbackControl(float Circle, int CurrentVelocity);
int Velocity_FeedbackControl(int TargetVelocity, int CurrentVelocity);
int PWM_Restrict(int PWM_P, int TargetVelocity);
#endif
main.c
#include "delay.h"
#include "usart.h"
#include "TB6612.h"
#include "motorencoder.h"
#include "usart.h"
#include "led.h"
#include "oled.h"
#include "key.h"
int TargetVelocity=0, TargetCircle=0, CurrentPosition, Encoder, PWM; //目标速度、目标圈数(位置)、编码器读数、PWM控制变量
float Velcity_Kp=20, Velcity_Ki=5, Velcity_Kd; //相关速度PID参数
float Position_Kp=120, Position_Ki=0.1, Position_Kd=400; //相关位置PID参数
int MortorRun; //允许电机控制标志位
/**************************************************************************
函数功能:OLED显示屏显示内容
入口参数:无
返回 值:无
**************************************************************************/
void Oled_Show(void)
{
OLED_Refresh_Gram(); //刷新显示屏
OLED_ShowString(00,00,"V_P Feedback"); //速度闭环控制
//显示目标位置,分正负
OLED_ShowString(00,10,"Target_P :");
if(TargetCircle>=0)
{
OLED_ShowString(80,10,"+");
OLED_ShowNumber(90,10,TargetCircle*1040*1.04,5,12); //1.04是误差系数,电机本身存在误差,可根据实际情况调整该系数以提高控制精度
}
else
{
OLED_ShowString(80,10,"-");
OLED_ShowNumber(90,10,-TargetCircle*1040*1.04,5,12); //1.04是误差系数,电机本身存在误差,可根据实际情况调整该系数以提高控制精度
}
//显示当前位置,分正负
OLED_ShowString(00,20,"Current_P:");
if(CurrentPosition>=0)
{
OLED_ShowString(80,20,"+");
OLED_ShowNumber(90,20,CurrentPosition,5,12);
}
else
{
OLED_ShowString(80,20,"-");
OLED_ShowNumber(90,20,-CurrentPosition,5,12);
}
//显示目标速度,分正负
OLED_ShowString(00,30,"Target_V :");
if(TargetVelocity>=0)
{
OLED_ShowString(80,30,"+");
OLED_ShowNumber(90,30,TargetVelocity,5,12);
}
else
{
OLED_ShowString(80,30,"-");
OLED_ShowNumber(90,30,-TargetVelocity,5,12);
}
//显示当前速度,即编码器读数,分正负
OLED_ShowString(00,40,"Current_V:");
if(Encoder>=0)
{
OLED_ShowString(80,40,"+");
OLED_ShowNumber(90,40,Encoder,5,12);
}
else
{
OLED_ShowString(80,40,"-");
OLED_ShowNumber(90,40,-Encoder,5,12);
}
//显示速度控制值,即PWM,分正负
OLED_ShowString(00,50,"PWM :");
if(PWM>=0)
{
OLED_ShowString(80,50,"+");
OLED_ShowNumber(90,50,PWM,5,12);
}
else
{
OLED_ShowString(80,50,"-");
OLED_ShowNumber(90,50,-PWM,5,12);
}
}
/**************************************************************************
函数功能:主函数
入口参数:无
返回 值:无
**************************************************************************/
int main(void)
{
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //中断优先级分组
delay_init(); //延迟函数初始化
JTAG_Set(JTAG_SWD_DISABLE); //关闭JTAG才能开启OLED显示屏
LED_Init(); //LED灯初始化
OLED_Init(); //OLED显示屏初始化
MotorEncoder_Init(); //编码器初始化 使用定时器4
TB6612_Init(7199, 0); //电机驱动外设初始化 使用定时器3
EncoderRead_TIM2(7199, 99); //10ms读取一次编码器(即100HZ),电机减速比为20,霍尔编码器精度13,AB双相组合得到4倍频,
//则转1圈编码器读数为20*13*4=1040,电机转速=Encoder*100/1040r/s 使用定时器2
delay_ms(2000); //延迟等待初始化完成
while(1)
{
delay_ms(5);
LED=0; //LED灯闪烁
if(KEY_Scan())MortorRun=!MortorRun; //按下按键MortorRun取反
Oled_Show(); //OLED显示屏显示内容
}
}


评论(0)
您还未登录,请登录后发表或查看评论