

0. 前言
作为激光雷达的回环而言,最经典的仍然是Scan Context,但是Scan Context仍然会存在有一些缺陷,一是它只利用了最大的高度,丢失了很多点云信息,二是Scan-Context不具有旋转不变性,需要进行暴力匹配,三是Scan-Context缺少特征提取步骤。所以文章《LiDAR Iris for Loop-Closure Detection》,同时作者也将代码开源到了Github上:https://github.com/JoestarK/LiDAR-Iris,下面我们来详细梳理一下这篇文章.
1. 闭环策略
作为SLAM的回环来说,目前主要有四种闭环检测策略:
- point-to-point matching,即点到点的匹配(如,ICP,NDT及其变种);
- 从3D点云中检测关键点,并从每个关键点位置中提取描述子,然后利用词袋模型(bag-of-words (BoW) model)进行场景匹配(BoW,BoW3d等)。
- 从点云中提取以直方图的形式表示的全局描述子(如ESF, FPFH, VFH, M2DP,Scan Cntext)。
- 基于卷积神经网络(CNNs)模型的方法。
2. 本文贡献
如上文所说,目前激光的全局或者局部的描述子能力和不变性有所欠缺,同时不具有旋转不变性,需要暴力的匹配,在Scan Context中使用了 (Rings)的快速搜索算法来节省时间,但是也损失了对应的精度。而本文的方法解决了上述的缺陷
- 提出了一个LiDAR点云的全局描述符LiDAR Iris,将一个地方总结为在LiDAR-Iris图像表示上进行几次Gabor过滤和阈值操作后获得的二进制签名图像, 充分利用了点云的大部分信息。
- 该全局描述符具有旋转不变性,避免了暴力搜索,节约了计算资源。
- 与现有的LIDAR全局描述符相比,该描述符的性能达到了SOTA。
3. 主要内容
准确的说,Lidar Iris描述符的生成理论上可以从执行上可以分解为三个模块:一是生成Lidar-Iris图像的表示;二是通过傅立叶变换使得Lidar-Iris具有平移不变性;三是基于LoG-Gabor滤波器的二值特征提取。下面我们就来对这三个执行模块进行分析.
3.1 LiDAR-lris图像
首先和Scan Context思想类似,即将三维点云映射成二维图像,对应的方法如下图所示 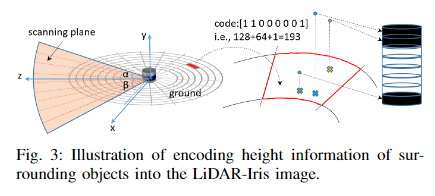 作者保留了一个以雷达为中心的
的一个正方形作为有效感应区(本文取
),激光雷达的位置作为正方形的中心。以这个正方形为单位,将点云离散为80(沿半径的方向的) * 360(角向)的bin。值得注意的是,压缩成二维平面后,每一个区域中仍然具有高度、距离、反射率等特性,如果舍去就和栅格地图无异了,所以作者通过八位二进制代码对同一个bin内的所有点进行编码。以高度的编码方法举例,对于每一个bin内的点云集,首先按照高度的大小顺序,线性离散为8个bin,并不是每个bin都会有点,有点的bin值为1,否则为0,从而可以获得上图中的8位二进制编码。
作者保留了一个以雷达为中心的
的一个正方形作为有效感应区(本文取
),激光雷达的位置作为正方形的中心。以这个正方形为单位,将点云离散为80(沿半径的方向的) * 360(角向)的bin。值得注意的是,压缩成二维平面后,每一个区域中仍然具有高度、距离、反射率等特性,如果舍去就和栅格地图无异了,所以作者通过八位二进制代码对同一个bin内的所有点进行编码。以高度的编码方法举例,对于每一个bin内的点云集,首先按照高度的大小顺序,线性离散为8个bin,并不是每个bin都会有点,有点的bin值为1,否则为0,从而可以获得上图中的8位二进制编码。
同时借鉴了虹膜算法,将我们bin的环形鸟瞰图转化为像素条,形成和Scan Context类似的结果,有区别的是Lidar-IRIS图像的像素强度为每个bin的8位二进制数所转换的十进制数,而Scan Context是获取了当前位置的最高高度,这样其实是丢失了很多信息。 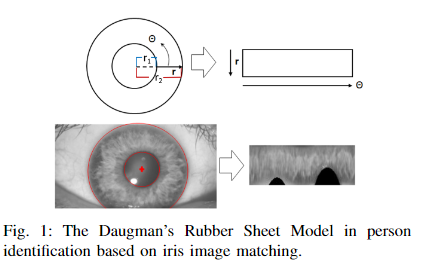 最后,与现有的基于直方图的全局描述符相比,所提出的编码过程不需要对每个bin中的点进行计数,从而提高了计算效率,但是又保存了大致的特征,不会受到噪声的干扰。
最后,与现有的基于直方图的全局描述符相比,所提出的编码过程不需要对每个bin中的点进行计数,从而提高了计算效率,但是又保存了大致的特征,不会受到噪声的干扰。
3.2 平移不变性Lidar-Iris的傅立叶变换
虽然在空间上来看是一个圆,应该有旋转不变性。但我们按照
展开成 2D 图像后,像素条 对 Lidar 的朝向就变得敏感了。朝向稍微偏几度可能整体图像就有比较大的平移从而不相似了。所以作者提出了平移不变性Lidar-Iris的傅立叶变换。在学过图像处理的同学知道,傅里叶频谱可以有效地解决平移导致匹配重合度不高的问题 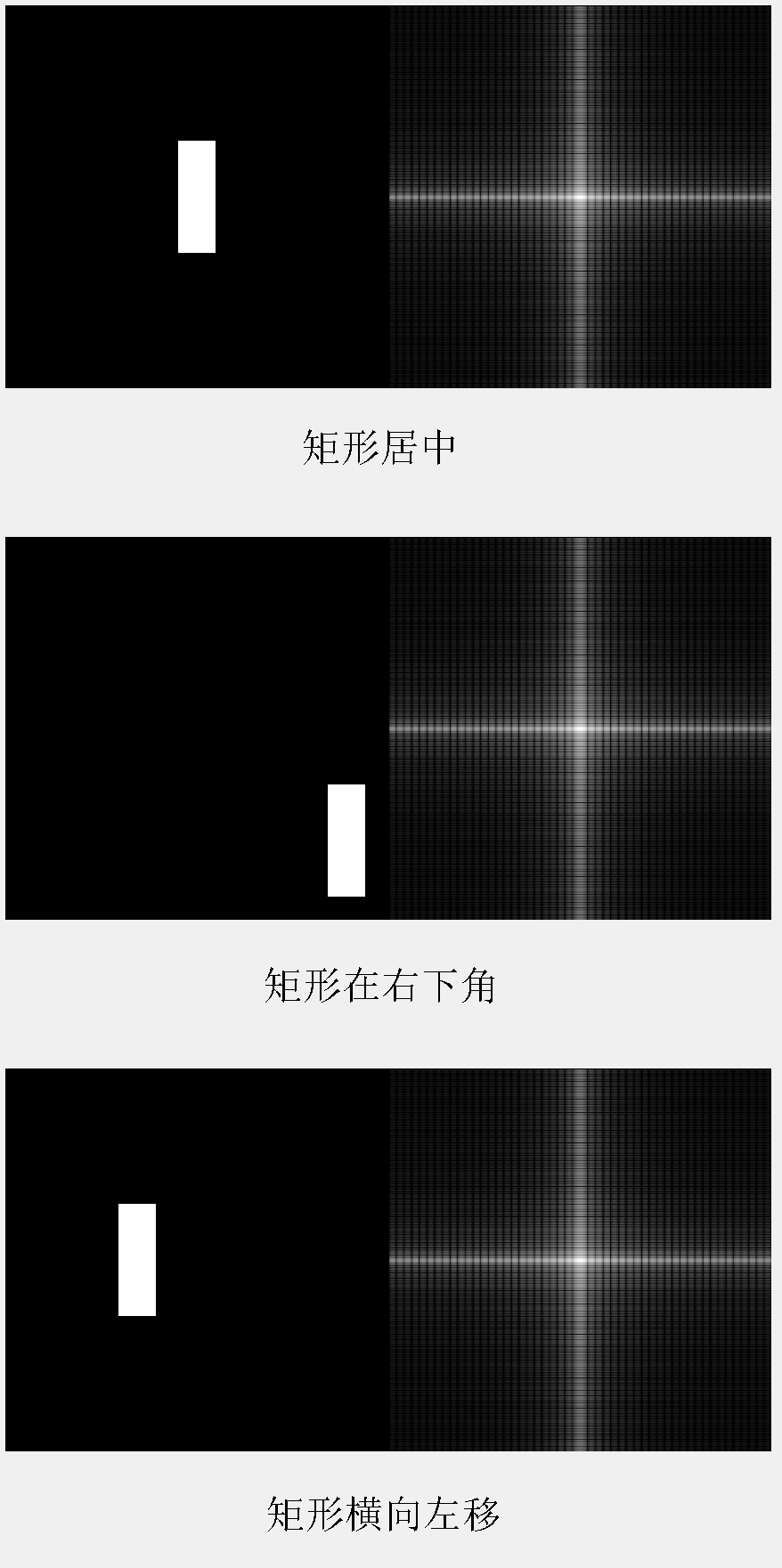
同时傅里叶本身又具有旋转变化性,这就导致非常适合我们的像素条的监测。 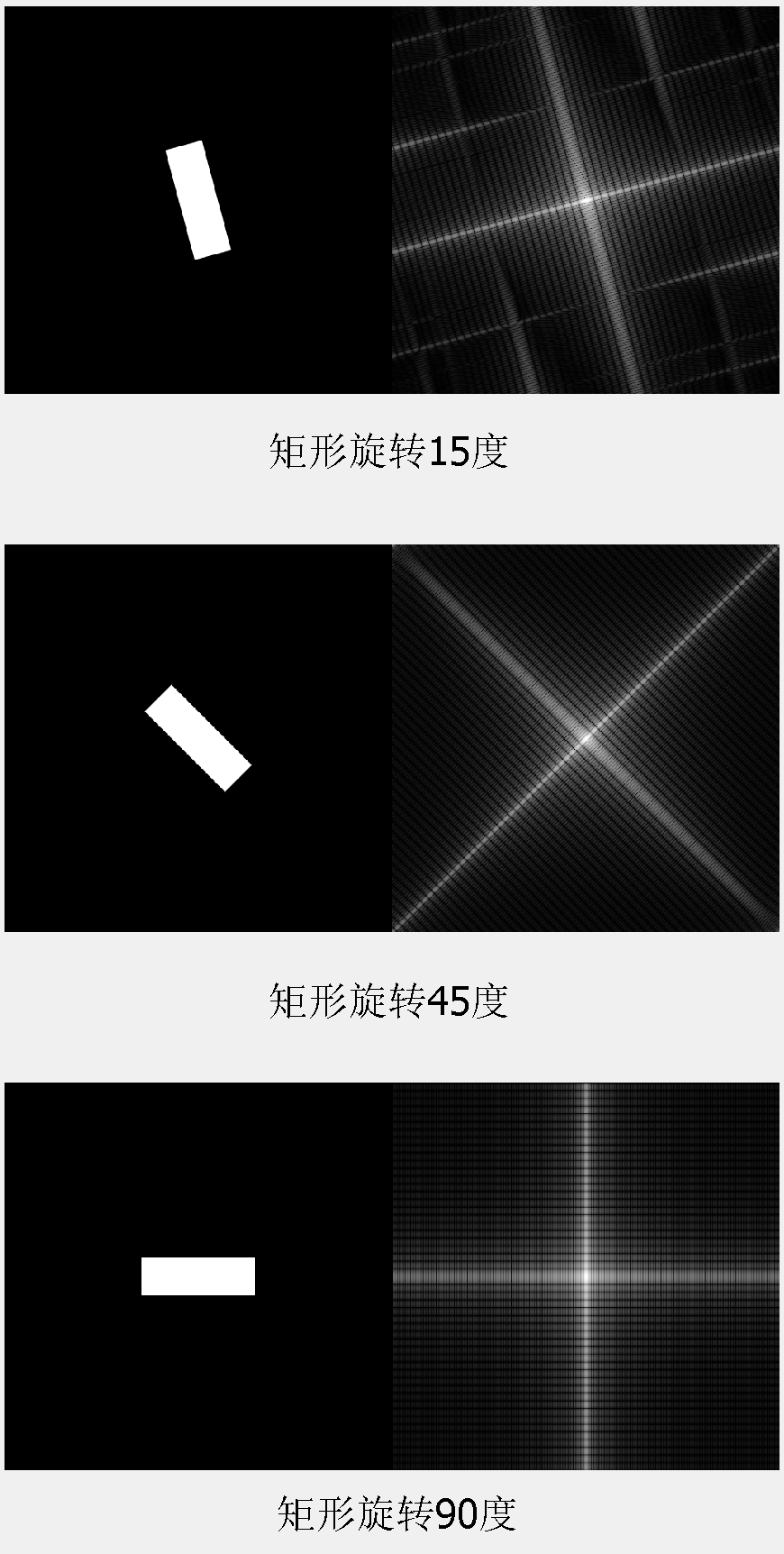
基于傅里叶变换的方案能够估计粗略的点云旋转、缩放和平移(用不到缩放)。点云的旋转对应于经过傅里叶变换后的Lidar-IRIS图像的水平平移,反映到傅里叶变换后两幅图像是完全没有差异的。
而点云的平移则是对应傅里叶变换后的 LiDAR-Iris 图像的垂直方向上的平移,会引起Lidar-IRIS 图像像素强度的轻微变化,从而导致傅里叶变换后本身的频谱发生轻微的变化。 但是Lidar-IRIS以bin为最小单位保留了点云的绝对内部结构,并没有那么高的分辨率,所以提高了辨别能力的同时又对图像像素强度的变化具有鲁棒性, 所以可以忽略由机器人在小范围内平移引起的 LiDAR-Iris 图像中强度的变化。
假设两个Lidar-IRIS图像仅仅差别一个位移( ),例如 ,那么这两个图像之间的傅立叶变换可以定义为
对应的,归一化的交叉功率谱定义为:
其中 表示复共轭。我们可以看到在简化后的归一化的交叉功率谱之间的关系,只有和初始位置以及移动来变化的。取傅里叶逆变换 ,这意味着 仅在 为非零。
3.3 基于LoG-Gabor滤波器的二值特征提取
最后一步就是使用LoG-Gabor滤波器从Lidar-IRIS图像中深入提取特征,LoG-Gabor滤波器可用于将Lidar-IRIS区域中的数据分解为以不同分辨率出现的分量,与传统的傅里叶变换相比,它的优势在于允许频率数据局部化,允许在相同位置和分辨率进行特征匹配。为了确保实时性,仅使用1D LoG Gabor滤波器。一维Log-Gabor滤波器的频率响应如下:
给出了滤波器的中心频率, 影响滤波器的带宽,并且 需要保持常数值。
利用八个1D LoG Gabor滤波器对Lidar-IRIS图像的每一行进行卷积,其中滤波器的波长增加相同的因子,从而得到每个滤波器的实部和虚部。在下图中,第一幅图像显示了八个1D log-Gabor滤波器,第二幅图像显示了前四个滤波器卷积响应的实部和虚部. 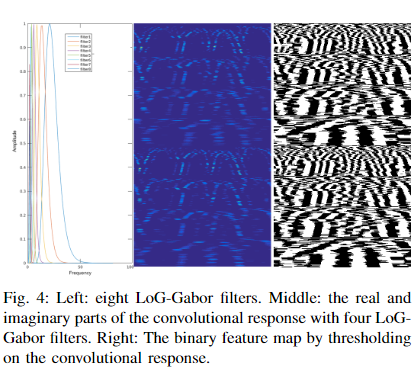
3.4 二进制特征数据闭环检测
为了将Lidar-IRIS应用于闭环检测,为每个点云生成一个Lidar-IRIS的二值特征图。因此,可以保存所有关键帧获取的Lidar-IRIS二进制特征的历史数据库。当前关键帧和每个历史关键帧的Lidar-IRIS二值特征贴图之间的距离由汉明距离计算。如果获得的汉明距离小于阈值,则将其视为环路闭合事件
4. 参考链接
https://zhuanlan.zhihu.com/p/460338683
https://blog.csdn.net/Yong_Qi2015/article/details/121689959

评论(0)
您还未登录,请登录后发表或查看评论