

0. 简介
对于Gazebo而言,我们知道其是可以通过与ROS的连接完成机器人建图导航的,那我们是否可以通过Unity来完成相同的工作呢,答案是肯定的。这一讲我们就来讲述使用Unity的“Turtlebot3”模拟环境,来运行ROS2中的“Navigation 2”以及“slam_toolbox”。
1. 代码编译
安装步骤如下所示,首先先下载“Navigation 2 SLAM Example Demo”仓库
git clone --recurse-submodule git@github.com:Unity-Technologies/Robotics-Nav2-SLAM-Example.git
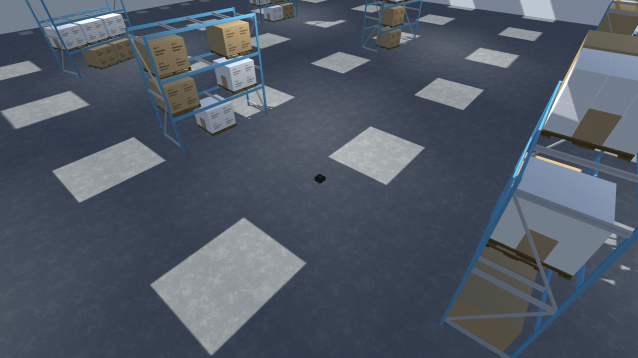
然后确保在Unity的版本以及开发包都已经安装完成,并在2020.2版本以后的Unity中打开Assets/Skenes/SimpleWarehouseScene场景
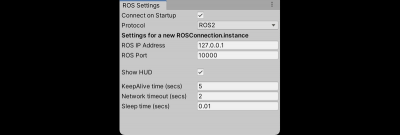
选择Unity的菜单“Robotics→ROSSettings”,确认以下设置
・连接启动:打钩
・Protocol:ROS2
・ROS Port:10000
・显示HUD:打钩
2. 设置ROS2 Docker环境
- 在“ros2_docker”的目录下运行以下命令
docker build -t unity-robotics:nav2-slam-example ./

- 在安装完后就可以直接通过命令行启动了
docker run -it --rm -p 6080:80 -p 10000:10000 --shm-size=1024m unity-robotics:nav2-slam-example
- 在浏览器中打开“http://127.0.0.1:6080”
- 并选择“System Tools→LXTerminal”
 、
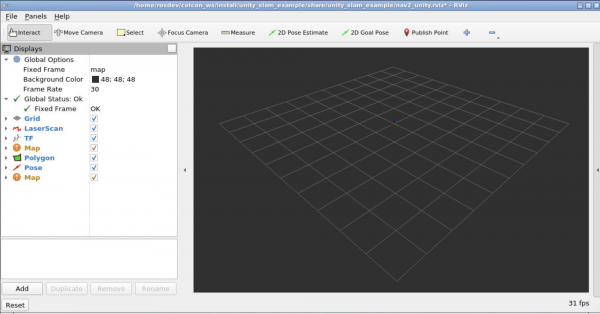
、 - launch文件的启动,并顺带启动了rviz2的界面
3. 实际运行
import os
from launch import LaunchDescription
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python.packages import get_package_share_directory
from launch_ros.actions import Node
def generate_launch_description():
package_name = 'unity_slam_example'
package_dir = get_package_share_directory(package_name)
return LaunchDescription({
# ros的tcp节点启动
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(get_package_share_directory(
'ros_tcp_endpoint'), 'launch', 'endpoint.py')
),
),
# rviz2启动
Node(
package='rviz2',
executable='rviz2',
output='screen',
arguments=['-d', os.path.join(package_dir, 'nav2_unity.rviz')],
parameters=[{'use_sim_time': True}]
),
# Nav2启动
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(get_package_share_directory(
'nav2_bringup'), 'launch', 'navigation_launch.py')
),
launch_arguments={
'use_sim_time': 'true'
}.items()
),
# SLAM Toolbox启动
IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(get_package_share_directory(
'slam_toolbox'), 'launch', 'online_async_launch.py')
),
launch_arguments={
'use_sim_time': 'true'
}.items()
)
})
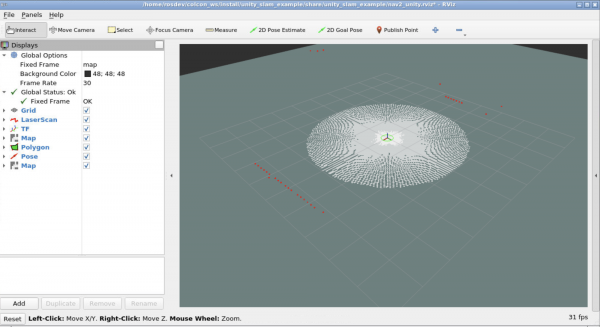
- 然后最后在Unity中按Play按钮。就可以看到在rviz输出了可视化信息。TurtleBot同时进行“建图”和“定位”。
- 同时Unity中也可以使用按键移动机器人以及相机
・WS : 前後
・AD : 左右
・EQ : 上下

- 如果点击rviz的“2d Goal Pose”,并在栅格地图中指定目标的姿态以及方向。TurtleBot也会移动到目标位置。
4. 参考链接
https://github.com/Unity-Technologies/Robotics-Nav2-SLAM-Example/blob/main/readmes/run_example.md
https://github.com/Unity-Technologies/Robotics-Nav2-SLAM-Example/blob/main/readmes/unity_viz.md




评论(2)
您还未登录,请登录后发表或查看评论